
энергетических характеристик.
![]()
![]()
![]()
![]()
![]()
В качестве исполнительного эле 21121o1410v мента могут применяться двигатели постоянного тока, переменного тока, эле 21121o1410v ктромагнитные муфты с приводным эле 21121o1410v ктрических массовых характеристик, надежности и технологичности или иного типа исполнительного эле 21121o1410v мента. В диапазоне мощностей до 500 Вт эле 21121o1410v ктропривод постоянного тока развивает большие ускорения, позволяющие сформировать широкополосный контур управления. Малые ошибки и высокая добротность, применение эффективных схем нелинейного управления позволяют обеспечивать
Однако традиционное построение эле 21121o1410v ктропривода в виде быстроходных эле 21121o1410v ктродвигателей постоянного или переменного тока и понижающего редуктора в настоящее время почти исчерпали возможности повышения точности, быстродействия и надежности оборудования.
Достоинства эле 21121o1410v ктроприводов на основе БМД:
в качестве исполнительного эле 21121o1410v мента привода был выбран безконтактный моментный двигатель ДБМ 185-16-0,3-2 механическая характеристика которого представлена на рисунке.3.
![]() , 27
, 27
Номинальная
скорость ![]() рад/с 18
рад/с 18
Номинальная
момент ![]() Н∙м 20,5
Н∙м 20,5![]()
Пусковой
момент ![]() Н∙м 49
Н∙м 49
Номинальный
ток ![]() , А 10,5
, А 10,5
8,6
3
Момент
инерции
двигателя ![]() , кг 15∙10-3
, кг 15∙10-3
![]()
![]()
Момент
двигателя ![]() , является
результатом
взаимодействия
тока,
, является
результатом
взаимодействия
тока,
![]()
![]()
где ![]() -
число
активных
проводников
в обмотке
якоря,
-
число
активных
проводников
в обмотке
якоря,
![]() -
число пар
полюсов,
-
число пар
полюсов,
![]() -
число
параллельных
ветвей,
-
число
параллельных
ветвей,
![]() -
поток
возбуждения.
-
поток
возбуждения.
![]()
![]()
![]()
где ![]() -
пусковой
момент;
-
пусковой
момент;
![]() -
номинальный
момент;
-
номинальный
момент;
![]() -
номинальная
скорость;
-
номинальная
скорость;
![]()
![]()
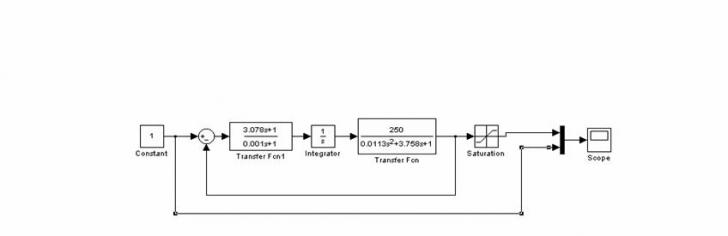
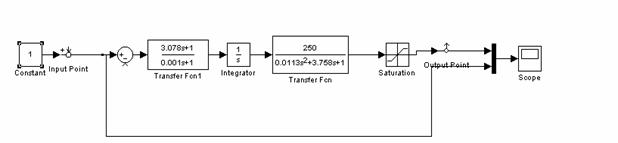
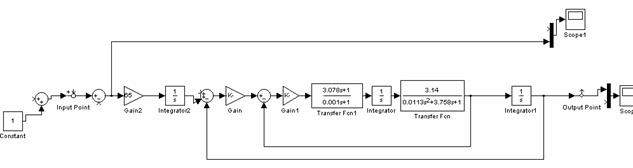
Передаточную функцию эле 21121o1410v ктродвигателя можно представить в виде:
![]()
Структурная схема эле 21121o1410v ктродвигателя представлена на рисунке.4.

![]()
![]()
![]()
![]()
![]()
Mathcad MatLab
Mathcad
Lp
Φp
max max
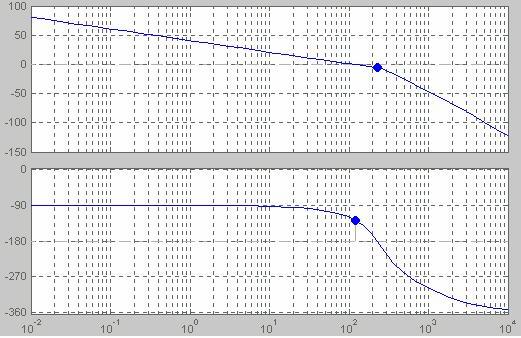
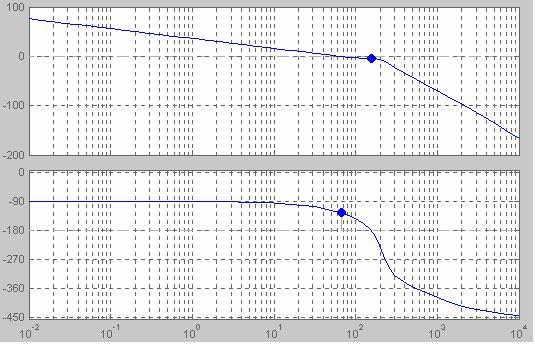
- 20 дб/дек, проведенная через контрольную точку, пересекает ось нуля децибелов в точке с частотой ω = КΏ, где КΏ - добротность по скорости системы.
Lf -
f

Lpf
Lz
 Φpf
Φpf
системы при нормальной эксплуатации должны поддерживать определенный режим работы объекта регулирования при действии на него многих возмущающих факторов. Такое может быть достигнуто лишь в автоматических системах регулирования, обладающих устойчивостью по отношению к этим воздействиям. Устойчивость системы означает, что малые изменения входного сигнала или какого-нибудь возмущения, начальных условий или параметров не приведут к значительным отклонениям выходного сигнала.
L
Simulink MatLab

Lpfz
Φpfz

tp c
max

Lpf
Φpf
L
Simulink MatLab

Lsz
Φsz

tp c
max
Lku
Φku
L
Simulink MatLab
Lb
Φb

tp c
max
|
