Drumul în plan
Generalitati
Proiectarea unui traseu de drum se face în functie de conditiile naturale, tehnice si economice precum si pe baza vitezei de proiectare si a recensamintelor de trafic.
Desi traseul cel mai scurt între doua puncte este linia dreapta, de cele mai multe ori nu putem realiza trasee numai în aliniamente datorita obstacolelor naturale sau artificiale sau a punctelor obligate prin care trebuie sa treaca drumul respectiv.
Aceste conditii impuse duc la aparitia unui traseu sub forma unei linii frânte, ale carui segmente trebuie racordate prin curbe, de obicei arce de cerc.
Introducerea curbelor în traseu prezinta unele dezavantaje pent 757f52h ru circulatia vehiculelor si anume:
se reduc confortul si siguranta circulatiei, mai ales pentru vehiculele care circula cu viteza mare, existând pericolul, datorita aparitiei fortei centrifuge în curba ca vehiculele sa derapeze sau sa se rastoarne.
se mareste lungimea traseului în raport cu drumul în aliniament
vizibilitatea în curba este micsorata mai ales în deblee sau zone împadurite.
Tendinta actuala, mai ales în proiectarea autostrazilor, o constituie introducerea în traseu a unor succesiuni de curbe cu raze mari care sa nu necesite amenajari speciale, conditiile de circulatie fiind asemanatoare cu cele din aliniament.
În acelasi timp, si aliniamentele prea lungi pot prezenta urmatoarele inconveniente si anume:
pot deveni monotone si pot atenua atentia conducatorilor auto care au tendinta sa sporeasca viteza, putându-se produce accidente grave.
în timpul noptii, circulatia este stânjenita pe aliniamentele lungi datorita farurilor vehiculelor care circula din sens opus
aliniamentele se încadreaza mai greu în peisaj datorita variatiilor formelor de relief, nearmonizandu-se cu acestea.
Drumul trebuie proiectat echilibrat în plan, cu aliniamente cu lungime maxima de 4 km si curbe amenajate corespunzator (aplicarea supraînaltarii si supralargirii caii) inclusiv cu asigurarea vizibilitatii. Se apreciaza de exemplu ca un traseu de ses este echilibrat daca 40% din lungimea acestuia este în aliniament.
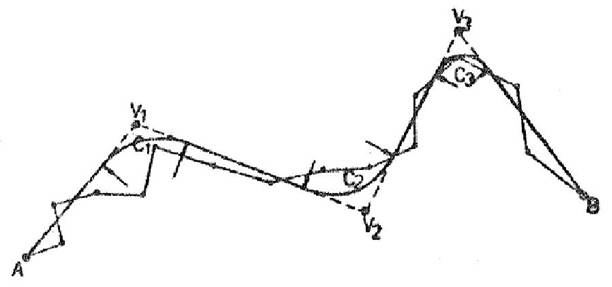
Racordarea aliniamentelor se poate face prin curbe interioare sau exterioare (în cazul terenurilor accidentate, atunci când aliniamentele se intersecteaza în unghiuri ascutite, mai mici de 40o iar introducerea unor curbe exterioare ar mari declivitatea prin scurtarea traseului.) În functie de pozitia centrului de curbura fata de traseu si de sensul de parcugere, curbele pot fi la dreapta sau la stânga, iar dupa modul în care se succed, pot fi curbe de acelasi sens, care se pot înlocui cu o singura curba daca conditiile o permit sau curbe de sens contrar între care trebuie lasat un aliniament minim, de 1,4Vp, parcurs în 5 secunde (considerat timp de reactie al conducatorului auto pentru a schimba directia) pentru a putea permite introducerea racordarilor în plan si în spatiu.
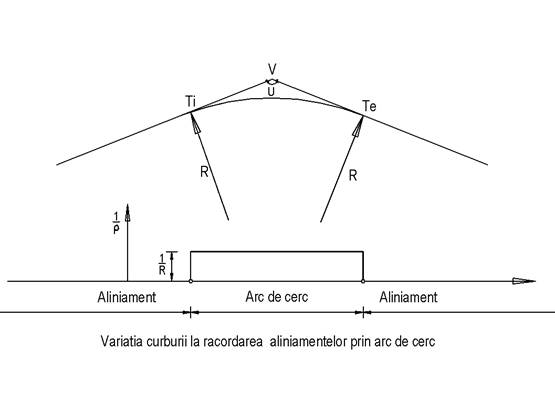
RACORDAREA ALINIAMENTELOR CU CURBE CIRCULARE
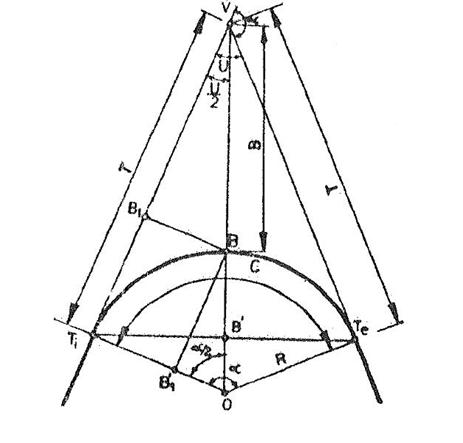
Racordarea aliniamentelor cu curbe, în cazul general, arc de cerc, implica determinarea elementelor principale ale acestora necesare pentru trasarea pe teren si stabilirea lungimii si configuratiei finale a traseului, si anume:
unghiul U dintre aliniamente care se masoara sau se determina prin calcul (intersectia dintre doua aliniamente se noteaza cu Vn, n reprezentând numarul curbei în parcursul traseului, de la originea lui)
unghiul a, suplimentul unghiului U. Respectiv unghiul la centrul racordarii
raza R a racordarii care se alege functie de relief si de viteza de proiectare
Elementele principale ale curbei sunt:
Tangenta:![]()
Bisectoarea :
Lungimea curbei: ![]()
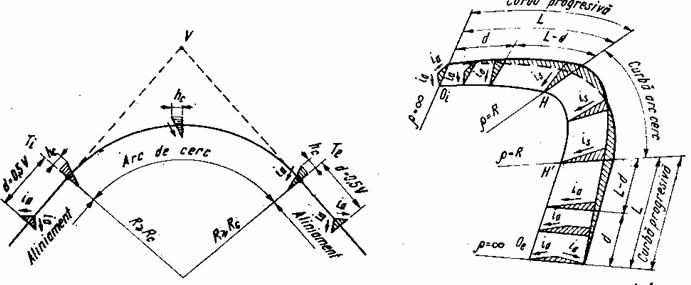
Punctul de tangenta unde începe curba se numeste tangenta de intrare si se noteaza cu Ti iar punctul unde se sfârseste curba se numeste tangenta de iesire si se noteaza cu Te, având indicele n acelasi ca si vârful de unghi ce reprezinta numarul curbei.
Elementele U, R, T, C, B, ale curbei arc de cerc, se înscriu în dreptul curbei respective si, împreuna cu viteza de proiectare, caracterizeaza curba.
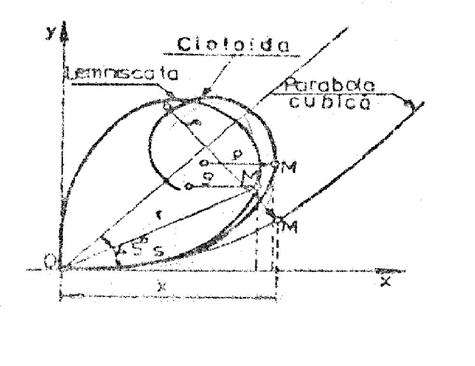
RACORDAREA ALINIAMENTELOR PRIN CURBE PROGRESIVE
Necesitatea introducerii curbelor progresive
Un vehicul ce parcurge o curba este solicitat de fortele de rezistenta din aliniament si de forta centrifuga, îndreptata spre exteriorul curbei, pe directia razei.
![]()
unde:
- P este greutatea vehiculului în daN
- g este acceleratia gravitationala în m/s2
- v viteza de circulatie în m/s
- R raza curbei în m
În punctul de tangenta între aliniament si curba, raza de curbura a traseului trece brusc de la ∞ (în aliniament) la valoarea R, iar curbura variaza de asemenea brusc, de la 0 la valoarea 1/R, traseul având o dubla discontinuitate
Forta centrifuga se aplica în centrul de greutate al vehiculului si tinde sa scoata vehiculul din curba, producând alunecarea transversala - derapajul -sau rasturnarea vehicului. Aparitia brusca a fortei centrifuge în punctul de intrare în curba, mai ales la viteze mari, provoaca deplasarea violenta în lateral a vehiculului si da o senzatie de nesiguranta calatorilor.


AMENAJAREA ÎN SPAŢIU
Curbe izolate
Trecerea de la profilul transversal în aliniament în forma de acoperis cu doua pante transversale la profilul transversal cu o singura înclinare spre interiorul curbei se numeste amenajare în spatiu. Aceasta operatie se realizeaza prin doua operatii distincte:
- Convertirea, care consta din transformarea profilului cu doua pante într-un profil cu panta unica, egala cu cea din aliniament
- supraînaltarea, care consta din cresterea treptata a valorii pantei transversale de la cea din aliniament pâna la panta maxima din viraj
 Lungimea pe care se efectueaza convertirea si
supraînaltarea coincide cu lungimea curbei progresive L si se
numeste rampa de racordare. Aceasta se amenajeaza atât la
intrarea cât si la iesirea din curba, pe curba arc de cerc
pastrându-se pante de convertire sau de supraînaltare constante.
Lungimea pe care se efectueaza convertirea si
supraînaltarea coincide cu lungimea curbei progresive L si se
numeste rampa de racordare. Aceasta se amenajeaza atât la
intrarea cât si la iesirea din curba, pe curba arc de cerc
pastrându-se pante de convertire sau de supraînaltare constante.
Curbe apropiate
Racordarea în spatiu pune probleme speciale de rezolvare în legatura cu pozitia reciproca a curbelor. Se considera ca doua curbe se trateaza separat, independent, atunci când lungimea aliniamentului masurata între punctele de tangenta al curbelor de raza R este mai mare de 1,4 V (V este viteza de proiectare în Km/h iar distanta rezulta în m).
|
|
|
|
Amenajarea rampei de racordare |
Amenajarea rampei de racordare în cazul racordarii cu doua arce de clotoida |
|
|
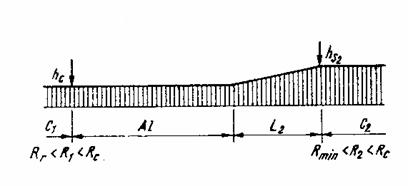
Amenajarea curbelor legate de acelasi sens când ambele raze au valori cuprinse între raza curenta si raza recomandabila |
Curbele succesive de acelasi sens sunt mai dificil de amenajat, de obicei se prefera înlocuirea celor doua curbe printr-una singura sau înlocuirea aliniamentului intermediar printr-o succesiune de doua cel mult trei curbe cu raze diferite, având tangente comune, cu conditia ca raportul dintre raze sa fie cuprins între 0,75 si 1,50.
La curbele succesive de sens contrar când aliniamentul dintre ele, masurat în punctele de tangenta ale curbelor circulare de raza R au lungimea mai mica de 1,4 V, iar razele curbelor au valori cuprinse între raza minima si cea curenta sau între raza curenta si cea recomandabila, amenajarea distantei dintre ele se face astfel: profilul convertit sau supraînaltat din prima curba se roteste în jurul axei partii carosabile, generând o suprafata elicoidala pâna se ajunge la începutul arcului de cerc al celei de-a doua curbe, la panta transversala a acesteia, contrara fata de prima. În acest caz, pe distanta de amenajare, apare un profil orizontal care trebuie sa fie amplasat numai pe aliniament sau în punctul de inflexiune dintre clotoide, neadmitându-se pe unele dintre curbe, pante transversale contrare sensului lor.
Pe lungimea întregii rampe de racordare, suprafata caii rezulta ca o suprafata strâmba, riglata în spatiu.
VIZIBILITATEA ÎN PLAN
Prin vizibilitatea unui drum se întelege distanta minima, libera de obstacole, pâna la care conducatorul autovehiculului trebuie sa vada în conditii bune suprafata drumului de parcurs, astfel încât sa poata efectua manevrele de frânare sau ocolire, pentru a preveni ciocnirea cu un obstacol.
În aliniament si declivitate exista o buna vizibilitate a drumului, în curbe, ca si pe racordarile verticale convexe sau la intersectiile de strazi, vizibilitatea este împiedicata daca în câmpul vizualal conducatorului auto, sunt obstacole de tipul unor taluzuri de debleu, ziduri de sprijin,vegetatie, cladiri, etc.
Distanta de vizibilitate se determina din conditia ca un autoturism care merge cu viteza de proiectare sa poata opriprin frânare sau sa îl ocoleasca.
Distanta totala de frânare se compune din distanta de frânare propriu-zisa e, din spatiul parcurs în timpul de deliberare s si din spatiul de siguranta S.

E=s+e+S
În ipoteza opririi prin frânare la o distanta de 10 m de obstacol, cu timp de deliberare de 2/3 s,
![]()
Pentru ca autovehiculul sa poata frâna pe distanta E, obstacolul trebuie sa fie vazut cel putin pe aceasta distanta, considerata distanta de vizibilitate.
VIZIBILITATEA ÎN CURBĂ
În curbe trebuie luate masuri pentru asigurarea vizibilitatii deoarece, datorita curburii, razele vizuale fiind dirijate dupa coarde, acestea ies din planul partii carosabile, putând întâlni diferite obstacole. Aceste masuri constau în degajarea partii din interiorul curbei astfel încât sa se asigure pe tot parcursul distanta de vizibilitate necesara evitarii unui obstacol sau a unui vehicul ce circula din sens invers neregulamentar.

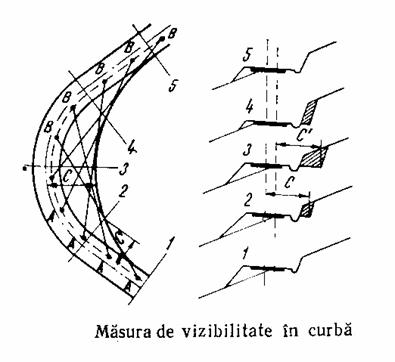
Se defineste distanta libera laterala ca fiind distanta de la axa benzii interioare de circulatie pâna la limita câmpului de vizibilitate si se determina cu relatia:
Distanta C de la axa drumului la curba de vizibilitate se numeste masura de vizibilitate si este egala cu :
![]()
ASIGURAREA VIZIBILITĂŢII LA ÎNCRUCIsĂRI DE DRUMURI
Încrucisarile de drumuri trebuie amenajate astfel încât conducatorii auto ce sosesc în acelasi timp într-o intersectie sa se poata observa de la o distanta suficienta pentru a putea frâna si opri înainte de punctul lor de coliziune.
Pentru doua vehicule A si B care circula cu vitezele vA si vB distanta de frânare va fi:
|
|
|
Ipotenuza AB reprezinta raza vizuala limita în momentul când cei doi conducatori auto trebuie sa se vada pentru a putea frâna si opri. Aceasta raza vizuala se considera egala la o înaltime egala cu înaltimea ochiului conducatorului auto, la 1,20 m deasupra soselei.
Drumul în profil longitudinal
Elementele profilului longitudinal
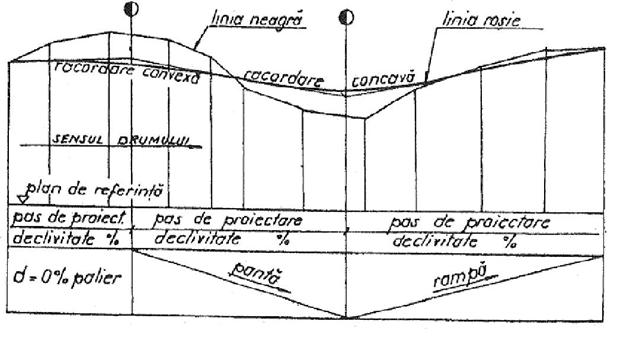
Profilul în lung reprezinta proiectia desfasurata pe un plan a intersectiei cu un plan vertical ce trece prin axa drumului cu suprafata terenului obtinându-se o linie neregulata care se numeste linia terenului sau linia neagra si cu suprafata caii care se prezinta sub forma unei linii continue, regulate care se numeste linia proiectului sau linia rosie. Fiecare punct al traseului îi corespunde în profil longitudinal o pereche de cote, raportate la un sistem de referinta , cota terenului si cota proiectului. Diferenta dintre cele doua cote se numeste cota de executie sau diferenta în ax; astfel drumul se afla în umplutura daca cotele de executie sunt pozitive sau în sapatura daca cotele sunt negative.
Proiectarea judicioasa a liniei rosii are o mare însemnatate dar având în vedere varietatea formelor de relief si gradul de accidentare ca si diversele situatii întâlnite pe teren, pentru studiul si fixarea liniei rosii nu sunt stabilite reguli fixe. Sunt luate în considerare o serie de criterii generale, tehnice si economice si anume:
-declivitatea maxima admisibila- stabilite pe cale teoretica, functie de caracteristicile vehiculelor predominante în circulatie pe sectorul respectiv, de viteza de proiectare impusa,de rezistentele întâmpinate de vehicule, de puterea motorului necesara împingerii lor. La proiectarea liniei rosii trebuie sa se tina seama si de valoarea declivitatii minima deoarece pe sectoarele de debleu trebuie asigurata scurgerea apelor. Sub acest aspect, scurgerea apelor trebuie sa aiba o declivitate minima de 0,5% si în mod exceptional 0,2%.
-pasul de proiectare- reprezinta distanta dintre doua schimbari de declivitate a liniei rosii; din acest punct de vedere se recomanda ca pasul de proiectare sa nu coboare sub anumite valori minime, în scopul evitarii fragmentarii profilului longitudinal prin dese schimbari de declivitate. Lungimea minima a pasului de proiectare se mai determina si din conditia de a evita suprapunerea a doua tangente succesive. De asemenea este recomandabil ca punctele de schimbare de declivitate sa nu fie amplasate pe curbele din plan, la limita se admite ca schimbarile de declivitate sa se faca si în punctele de tangenta de intrare sau de iesire din curbele din plan sau, în mod exceptional, în punctele de bisectoare.
-volumul de terasamente- se recomanda sa fie minim pentru reducerea cheltuielilor de investitie deoarece terasamentele reprezinta 30-50% din costul de executie.
-compensarea terasamentelor- se face dupa calculul volumelor de terasamente dar practic se încearca asezarea liniei rosii astfel încât sa determine cu linia terenului suprafete practic egale de sapatura si împlinire. Fata de o asemenea pozitie se ridica apoi linia rosie cu 0,10-0,15 m deoarece la aceeasi înclinare si la aceeasi cota de executie, volumul de sapatura este mai mare decât cel de umplutura.
-cote obligatorii- se refera la respectarea anumitor cote pentru a satisface anumite conditii de functionare (lucrarile de regularizare ale râurilor,zonele inundabile, terasamentele pentru poduri si viaducte impun anumite cote care trebuie respectate de drumul nou construit
-racordarea declivitatilor- este un criteriu necesar pentru a se elimina discontinuitatile din punctele de schimbare de declivitate în vederea asigurarii vizibilitatii si a unei circulatii comode se prevede trecerea de pe o declivitate pe alta prin racordarea lor cu arce de cerc verticale; se face cu ajutorul racordarilor concave, pentru care razele de racordare se calculeaza din conditii de confort ale circulatiei si cu ajutorul racordarilor convexe, pentru care razele de racordare se calculeaza punând conditii de vizibilitate (ca si la asigurarea vizibilitatii în plan se considera ca un conducator auto aflat pe o declivitate trebuie sa observe la timp un obstacol situat pe parte carosabila de pe cealalta declivitate).
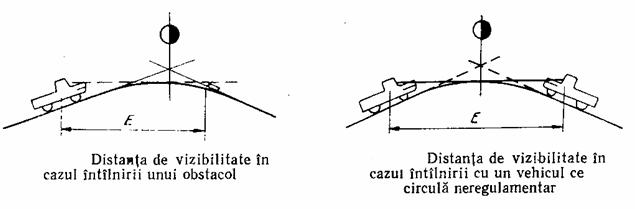
Asigurarea vizibilitatii în cazul racordarilor convexe
|
|
K=înaltimea ochiului conducatorului auto deasupra soselei K=1,20....1,50 m h= înaltimea obstacolului h = 0,10....0,20m |
|