ALTE DOCUMENTE
|
||||||||||
PROIECTAREA GIROSCOPULUI DE DIRECTIE
4.1 Notiuni introductive
Toate tipurile de aparate pentru masurarea directiei de zbor, cu exceptia girosemicompasului, au sensibilitate fata de un anumit ''pol'' sau sursa de radiatii, motiv pentru care fac parte din clasa compasurilor propriu-zise. Giroscopul astatic rapid nu poseda o asemenea proprietate, orientarea axei lui principale de rotatie fiind invariabila in spatiu. Din acest motiv aparatul giroscopic de directie cu axa proprie orizontala face parte din clasa girosemicompasurilor.
Componenta ![]() a vitezei absolute de rotatie a triedrului
orizontal local
a vitezei absolute de rotatie a triedrului
orizontal local ![]() , dupa verticala
locului
, dupa verticala
locului ![]() are expresia:
are expresia:
![]()
Componenta aceleiasi
viteze dupa axa verticala ![]() a triedrului orizontal
a triedrului orizontal ![]() legat de traiectorie, are forma:
legat de traiectorie, are forma:
![]()
in care ![]() este raza de curbura a traiectului.
este raza de curbura a traiectului.
Daca se zboara pe loxodroma, ![]() iar
iar ![]() , ceea ce inseamna
ca:
, ceea ce inseamna
ca:
![]()
![]()
Daca se zboara pe ortodroma, raza de curbura devine infinita si deci ![]()
Din relatia ![]() se observa ca daca aeronava zboara pe
loxodroma, planul meridianului locului se roteste in jurul verticalei cu o
viteza unghiulara care depinde atat de
se observa ca daca aeronava zboara pe
loxodroma, planul meridianului locului se roteste in jurul verticalei cu o
viteza unghiulara care depinde atat de ![]() si
si ![]() , cat si de
viteza de drum
, cat si de
viteza de drum ![]() si de unghiul de drum
si de unghiul de drum ![]()
Daca giroscopul astatic rapid cu axa orizontala folosit in girosemicompasuri, are axa proprie orientata in meridian, aceasta se abate cu viteza unghiulara:
![]()
Daca insa aeronava executa
un traiect ortodromic, planul meridianului se roteste fata de axa verticala ![]() a triedrului
a triedrului ![]() cu viteza
cu viteza ![]() care depinde numai de
care depinde numai de ![]() si
si ![]()
De data aceasta axa unui giroscop astatic rapid de directie se abate de la meridian cu viteza unghiulara:
![]()
Plecand de la constatarile facute anterior se pot imagina doua scheme cinematice de principiu pentru giroscoapele de directie (fig. 4.1 si fig. 4.2).
In ambele cazuri giroscopul este de tip astatic rapid avand configuratia inelelor din figura.
Dar pentru a se mentine aceasta configuratie, aparatul este prevazut cu doua sisteme de corectie, pentru mentinerea axei proprii de rotatie in planul orizontal, numit canal de corectie orizontal si pentru mentinerea giroscopului in planul meridianului numit canal de corectie in azimut.
Primul canal este prevazut cu un element sensibil si cu un motor de corectie care aplica un moment de corectie dupa axa inelului interior de suspensie.
Girosemicompas cu corectie dupa cadru
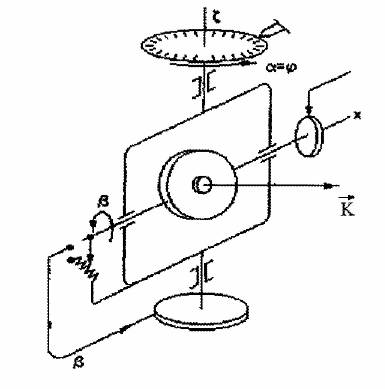
Fig. 4.1
In cazul fig. 4.1 corectia
pozitiei vectorului ![]() se face folosind un traductor care emite un
semnal de comanda d 313d38d aca axa proprie de rotatie a giroscopului deviaza de la
directia perpendiculara pe planul inelului exterior de suspensie.
se face folosind un traductor care emite un
semnal de comanda d 313d38d aca axa proprie de rotatie a giroscopului deviaza de la
directia perpendiculara pe planul inelului exterior de suspensie.
Desigur vectorul ![]() se poate mentine in plan
orizontal numai daca axa inelului exterior de suspensie este verticala.
se poate mentine in plan
orizontal numai daca axa inelului exterior de suspensie este verticala.
Girosemicompas cu corectie dupa pendul
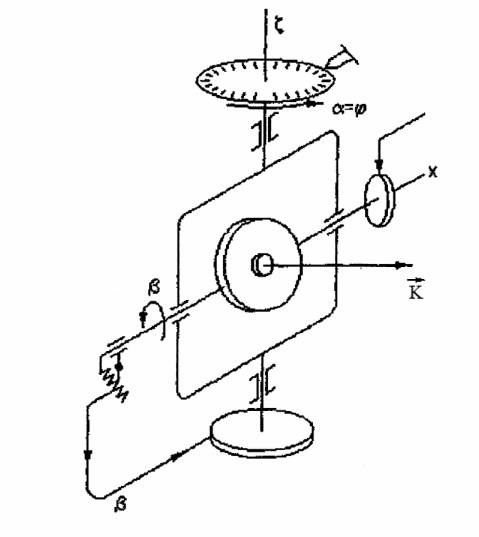
Fig. 4.2
In cazul schemei din fig.
4.2 corectia pozitiei vectorului ![]() fata de planul orizontal se face ''dupa pendul'' independent de pozitia axei inelului
exterior.
fata de planul orizontal se face ''dupa pendul'' independent de pozitia axei inelului
exterior.
De data aceasta
vectorul ![]() se mentine in planul orizontal cu ajutorul unui
comutator pendular montat sub girocamera, deci pe inelul interior de suspensie.
In ambele cazuri caracteristica de corectie poate fi proportionala, de tip
releu sau mixta.
se mentine in planul orizontal cu ajutorul unui
comutator pendular montat sub girocamera, deci pe inelul interior de suspensie.
In ambele cazuri caracteristica de corectie poate fi proportionala, de tip
releu sau mixta.
Cel de al doilea canal de corectie este menit sa compenseze abaterea relativa a giroscopului fata de meridian, ceea ce se poate asigura prin rotirea lui in jurul axei inelului exterior.
Semnalul de comanda al canalului de corectie in azimut se formeaza dupa relatiile:
![]()
![]()
Giroscoapele astatice
utilizate in aparatele de directie sunt libere in azimut (fig. 4.3), adica
vectorul ![]() poate ocupa orice orientare in planul
orizontal, sistemul de corectie nereactionand asupra inelului interior de
suspensie. Giroscopul are doar rolul de stabilizator in directie.
poate ocupa orice orientare in planul
orizontal, sistemul de corectie nereactionand asupra inelului interior de
suspensie. Giroscopul are doar rolul de stabilizator in directie.
Girosemicompas cu dispozitiv de compensare a rotatiei meridianului in azimut
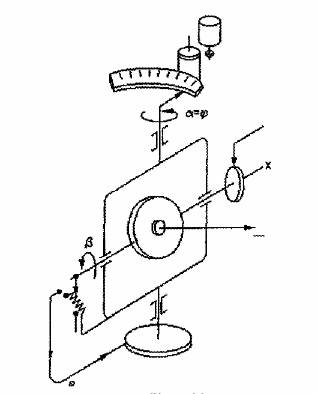
Fig. 4.3
Compensarea rotatiei aparente a axei giroscopului
fata de planul meridianului se asigura rotind cadranul sistemului de indicare a
capului cu vitezele unghiulare ![]()
![]() . Capul
. Capul ![]() se citeste cu un ac indicator montat pe axa
inelului exterior de suspensie si cu un cadran, semnalul de corectie in azimut
se introduce prin intermediul unui motor electric si a unui reductor care
asigura rotirea cadranului cu viteze mentionate. Modelul giroscopic al
indicatorului ortodromic se numeste de regula giroscop de directie, mai
frecvent girosemicompas.
se citeste cu un ac indicator montat pe axa
inelului exterior de suspensie si cu un cadran, semnalul de corectie in azimut
se introduce prin intermediul unui motor electric si a unui reductor care
asigura rotirea cadranului cu viteze mentionate. Modelul giroscopic al
indicatorului ortodromic se numeste de regula giroscop de directie, mai
frecvent girosemicompas.
Girosemicompasul cu corectie dupa cadru in miscare pe ortodroma
Se considera giroscopul de directie montat pe o aeronava care zboara uniform pe o traiectorie ortodromica, in situatia aceasta axa inelului exterior de suspensie se mentine verticala.
Cea mai simpla abordare este studierea problemei
considerand triedrul ![]() legat de traiectoria ortodromica, axa
legat de traiectoria ortodromica, axa ![]() fiind verticala, iar axa
fiind verticala, iar axa ![]() tangenta la traiectorie in sensul de miscare.
tangenta la traiectorie in sensul de miscare.
Miscarea vectorului ![]() in raport cu acest triedru se face cu ajutorul
unghiurilor
in raport cu acest triedru se face cu ajutorul
unghiurilor ![]() si
si ![]() , in care in
locul triedrului se va substitui cu noul triedru cu modificarile de rigoare
privind pe
, in care in
locul triedrului se va substitui cu noul triedru cu modificarile de rigoare
privind pe ![]() si
si ![]() (fig. 4.4).
(fig. 4.4).
Orientarea inelelor de suspensie ale girosemicompasului
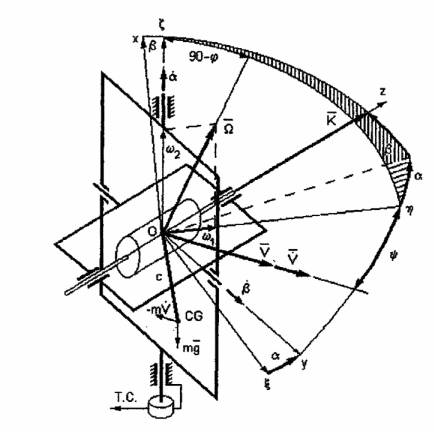
Fig. 4.4
Presupunem pe ![]() si
si ![]() de valori oarecare, proiectiile vitezei
unghiulare a triedrului
de valori oarecare, proiectiile vitezei
unghiulare a triedrului ![]() in raport cu axele
in raport cu axele ![]() si
si ![]() , au expresiile:
, au expresiile:
![]()
![]()
Aplicand acum ecuatiile de precesie, rezulta:
![]()
![]()
unde, ultima ecuatie s-a
obtinut considerand proiectia vectorului ![]() pe planul
orizontal
pe planul
orizontal ![]() si corespunzator inlocuind
si corespunzator inlocuind ![]() cu proiectia acestuia:
cu proiectia acestuia:
![]()
Din
sistemul de ecuatii de mai sus se obtin expresiile pentru vitezele ![]() si
si ![]() sub forma:
sub forma:
![]()
![]()
Proiectiile ![]()
![]()
![]() ale vitezei unghiulare de transport in cazul
deplasari e ortodroma au expresiile:
ale vitezei unghiulare de transport in cazul
deplasari e ortodroma au expresiile:
![]()
![]()
![]()
Momentele din expresiile ![]()
![]() sunt create de cele doua motoare de corectie
sunt create de cele doua motoare de corectie
Presupunand ca sistemul de
corectie orizontala are caracteristica ideala, momentele ![]() si
si ![]() trebuie sa aiba valori ce rezulta din
expresiile:
trebuie sa aiba valori ce rezulta din
expresiile:
![]()
![]()
Corespunzator ecuatiilor ![]()
![]()
![]() se introduc notatiile:
se introduc notatiile:
![]()
![]()
unde ![]() este unghiul format de vectorul
este unghiul format de vectorul ![]() cu axa
cu axa ![]() iar
iar ![]() reprezinta orizontala vitezei unghiulare de
rotatie a triedrului
reprezinta orizontala vitezei unghiulare de
rotatie a triedrului ![]()
![]()
![]()
Partea dreapta a celor doua relatii se anuleaza
simultan pentru ![]() si
si ![]() . Aceste valori
ale unghiurilor determina pozitia de echilibru a axei giroscopului, deoarece
lor le corespunde
. Aceste valori
ale unghiurilor determina pozitia de echilibru a axei giroscopului, deoarece
lor le corespunde ![]() , cand miscarea
giroscopului in jurul axelor
, cand miscarea
giroscopului in jurul axelor ![]() , respectiv
, respectiv ![]() inceteaza.
inceteaza.
Aceste doua pozitii de echilibru ale giroscopului sunt stabile, de remarcat
faptul ca valoarea vitezei de corectie este superioara vitezei unghiulare de
transport. De aceea procesele tranzitorii legate de variatia unghiului ![]() au o durata mult mai scurta decat cele care se
refera la unghiul
au o durata mult mai scurta decat cele care se
refera la unghiul ![]()
Din aceasta cauza se poate
considera ![]() si
si ![]() , iar durata
procesului tranzitoriu se neglijeza.
, iar durata
procesului tranzitoriu se neglijeza.
![]()
relatie ce exprima
aproximativ miscarea fortata a giroscopului cu unghiul ![]() fata de planul orizontal.
fata de planul orizontal.
De aici rezulta:

si arata ca vectorul ![]() se roteste astfel incat sa ajunga pe drumul
cel mai scurt in una din pozitiile de echilibru. Viteza maxima a giroscopului
in azimut se obtine pentru urmatoarele valori:
se roteste astfel incat sa ajunga pe drumul
cel mai scurt in una din pozitiile de echilibru. Viteza maxima a giroscopului
in azimut se obtine pentru urmatoarele valori:
![]() si are expresia
si are expresia ![]()
In cazul aparatelor prevazute cu dispozitiv de pornire, axa giroscopului poate fi adusa initial in pozitia paralela cu axa longitudinala a aeronavei. In alte cazuri, axa giroscopului poate ocupa o pozitie oarecare in azimut.
De data aceasta printr-un mijloc oarecare se consemneaza indicatia initiala
a aparatului si se memoreaza aceasta indicatie pe toata durata zborului pe
ortodroma impusa. Daca ![]() devine infinit precesia
devine infinit precesia ![]() se anuleaza, acest caz limita se obtine daca
sistemul de corectie orizontala are caracteristica de tip releu. In consecinta
daca motorul din canalul de corectie orizontala este comandat nu de
potentiometru, ci de un dispozitiv de comutare cu trei contacte, rezulta:
se anuleaza, acest caz limita se obtine daca
sistemul de corectie orizontala are caracteristica de tip releu. In consecinta
daca motorul din canalul de corectie orizontala este comandat nu de
potentiometru, ci de un dispozitiv de comutare cu trei contacte, rezulta:
![]() , pentru
, pentru ![]()
![]() , pentru
, pentru ![]()
![]() , pentru
, pentru ![]()
unde ![]() este viteza de corectie constanta datorata momentului
aplicat de motorul montat pe axa inelului exterior de suspensie.
este viteza de corectie constanta datorata momentului
aplicat de motorul montat pe axa inelului exterior de suspensie.
Unghiul ![]() se considera pozitiv daca vectorul
se considera pozitiv daca vectorul ![]() este ridicat deasupra planului orizontal si
negativ daca este sub acest plan. In schimb unghiul
este ridicat deasupra planului orizontal si
negativ daca este sub acest plan. In schimb unghiul ![]() se considera pozitiv daca vectorul
se considera pozitiv daca vectorul ![]() este deviat la stanga fata de planul meridianului
si negativ daca acest vector este deviat la dreapta fata de acelasi plan. Cu
aceste precizari si considerand unghiul
este deviat la stanga fata de planul meridianului
si negativ daca acest vector este deviat la dreapta fata de acelasi plan. Cu
aceste precizari si considerand unghiul ![]() mic, va rezulta:
mic, va rezulta:
![]()
Girosemicompasul cu corectie pendulara in miscare pe ortodroma
Se considera girosemicompasul
reprezentat prin schema din fig. 4.2 si se presupune ca axa inelului exterior
de suspensie se mentine in pozitie verticala, orientarea vectorului ![]() fata de triedrul ortodromic
fata de triedrul ortodromic ![]() care coincide cu planul orizontal local
care coincide cu planul orizontal local ![]()
Presupunand ca aeronava se deplaseaza uniform pe ortodroma, asupra corectorului pendular actioneaza acceleratia Coriolis:
![]()
Acceleratia Coriolis la
navigatia in emisfera Nordica a Pamantului este orientata transversal fata de
ortodroma si spre stanga in raport cu directia de deplasare. Ea determina
deviatia verticalei aparente fata de verticala reala cu un unghi ![]() exprimat prin relatia:
exprimat prin relatia:
![]()
Neglijand in expresia acceleratiei dupa axa
verticalei toti termenii exceptand ![]() , deci scriind
ca
, deci scriind
ca ![]() , va rezulta ca
verticala aparenta deviaza spre stanga fata de verticala reala cu unghiul
, va rezulta ca
verticala aparenta deviaza spre stanga fata de verticala reala cu unghiul ![]() dat de relatia:
dat de relatia:
![]()
Pentru ![]()
![]() se obtine
se obtine ![]() . Planul
orizontal aparent este rotit deci cu unghiu
. Planul
orizontal aparent este rotit deci cu unghiu ![]() in jurul tangentei la ortodroma. Pendulul de
corectie la orizontala se monteaza astfel ca planul sau de oscilatie sa contina
perpendiculara la planul orizontal aparent.
in jurul tangentei la ortodroma. Pendulul de
corectie la orizontala se monteaza astfel ca planul sau de oscilatie sa contina
perpendiculara la planul orizontal aparent.
Planul de oscilatie al pendulului trece prin axa ![]() al inelului exterior de suspensie si axa
proprie de rotatie
al inelului exterior de suspensie si axa
proprie de rotatie ![]() a giroscopului (fig. 4.5).
a giroscopului (fig. 4.5).
Orientarea axelor de coordonate in raport cu sistemul de suspensie
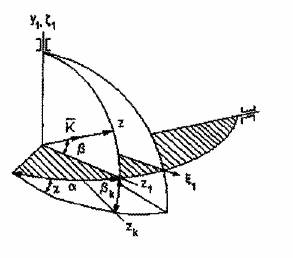
Fig. 4.5
Axele ![]()
![]()
![]() se gasesc in planul orizontal adevarat, iar
axele
se gasesc in planul orizontal adevarat, iar
axele ![]()
![]()
![]()
![]() se gasesc
se gasesc
intr-un plan vertical si anume in planul de oscilatie al pendulului. Axa ![]() este proiectia lui
este proiectia lui ![]() pe planul orizontal. Pentru
pe planul orizontal. Pentru ![]() axa
axa ![]() trebuie sa se gaseasca deasupra planului
orizontal.
trebuie sa se gaseasca deasupra planului
orizontal.
Unghiul ![]() poate fi exprimat in functie de unghiurile
poate fi exprimat in functie de unghiurile ![]() si
si ![]() folosind relatiile de calcul din trigonometria
sferica.
folosind relatiile de calcul din trigonometria
sferica.
Momentul de corectie ![]() este dat de relatia:
este dat de relatia:
![]()
Unghiul ![]() poate fi exprimat prin relatia:
poate fi exprimat prin relatia:
![]()
In cazul caracteristicii liniare de corectie vom avea:
![]()
![]()
Daca se tine sema de ![]() , relatia
, relatia ![]() devine:
devine:
![]()
Considerand ca aparatul are sistem de corectie orizontala cu caracteristica
de tip releu, formulele de calcul pentru ![]() si
si ![]() se obtin din
se obtin din ![]() si din relatia de mai sus luand
si din relatia de mai sus luand ![]()
![]()
![]()
In toate cazurile ![]() , axa proprie de
rotatie a giroscopului se gaseste in pozitie de echilibru astatic.
Corespunzator primelor doua cazuri, pozitia de echilibru coincide cu axa
, axa proprie de
rotatie a giroscopului se gaseste in pozitie de echilibru astatic.
Corespunzator primelor doua cazuri, pozitia de echilibru coincide cu axa ![]() , adica tangenta
la ortodroma, iar in ultimele doua cazuri pozitia de echilibru coincide cu
perpendiculara dusa in planul orizontal la vectorul
, adica tangenta
la ortodroma, iar in ultimele doua cazuri pozitia de echilibru coincide cu
perpendiculara dusa in planul orizontal la vectorul ![]()
Pentru primele doua pozitii de echilibru ![]()
![]() va rezulta:
va rezulta:
![]()
iar pentru ultimele doua cazuri ![]()
![]() rezulta:
rezulta:
![]()
4.2 Determinarea dimensiunilor giromotorului
Proiectarea si constructia giromotoarelor sunt conditionate de o serie de limitari referitoare la minimizarea dimensiunilor de gabarid, a greutatii si costului.
In cadrul giroagregatului folosit in sistemul de curs proiectat vom folosi un giromotor electric dublu asincron trifazat cu rotor masiv in scurtcircuit.
Rotorul va fi confectionat
dintr-un volant de otel, un ax cu cavitate interioara in care sunt doua pachete
de placi din otel turnate cu aliaj de Al. Aceste pachete formeaza ramurile de
scurtcircuitare ale infasurari rotorului. Prin dimensiunile principale ale
giromotorului intelegem dimetrul exterior ![]() , cel interior
, cel interior ![]() al volantului si lungimea
al volantului si lungimea ![]() a acestuia.
a acestuia.
Alegand valoare raportului ![]() se obtine o informatie asupra repartitiei
volumului giromotorului intre volant si electromotorul de actionare.
se obtine o informatie asupra repartitiei
volumului giromotorului intre volant si electromotorul de actionare.
alegem ![]()
La variatia lungimii ![]() a volantului, mentinand constante diametrele
a volantului, mentinand constante diametrele ![]() si
si ![]() se modifica proportional greutatea si momentul
cinetic al giromotorului.
se modifica proportional greutatea si momentul
cinetic al giromotorului.
alegem ![]()
Diametrul interior al statorului:
![]()
unde:
![]() - diametrul axului giromotorului;
- diametrul axului giromotorului;
![]() - grosimea bucsei statorului.
- grosimea bucsei statorului.
Alegand rapoartele optime:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Grosimea capacului ![]() este egala cu jumatatea diafragmei si alegem
este egala cu jumatatea diafragmei si alegem ![]()
Capacele trebuie sa fie rigide dar sa posede totusi elasticitatea necesara
pentru a nu crea tensiuni in lagare. Pentru diafragme vom alege: ![]()
Masa preliminara a partilor ![]() se calculeaza astfel:
se calculeaza astfel:
![]()
unde:
![]()
![]()
![]()
![]()
4.3 Determinarea cuplului
Cuplul nominal:
![]()
unde:
![]() - cuplul rezistent aerodinamic;
- cuplul rezistent aerodinamic;
![]() - cuplul de frecare in lagare.
- cuplul de frecare in lagare.
Cuplul rezistent aerodinamic:
![]()
unde:
![]() , este presiunea
mediului raportata la presiunea atmosferica.
, este presiunea
mediului raportata la presiunea atmosferica.
Cuplul de frecare in lagare:
![]()
In cazul giromotoarelor
pentru sisteme de directie se folosesc lagare speciale, cu inel intermediar
rotitor, care isi modifica sensul de rotatie dupa ![]()
De retinut ca rotirea inelelor intermediare la cele doua lagare se face in
sensuri opuse, in felul acesta frecarea se reduce cu ![]() din valoarea normala.
din valoarea normala.
4.4 Caracteristica mecanica
Aceasta caracteristica poate fi calculata folosind relatia:
![]()
unde ![]() este un parametru adimensional.
este un parametru adimensional.
Se impune ca ![]() , astfel se
alterneaza randamentul si performantele de regim nominal. Daca
, astfel se
alterneaza randamentul si performantele de regim nominal. Daca ![]() , trebuiesc
adoptate masuri ce constau in reducerea rezistentei rotorului.
, trebuiesc
adoptate masuri ce constau in reducerea rezistentei rotorului.
Valorile adoptate pentru ![]() si
si ![]() pot fi corectate grafic prin intersectia
caracteristicii mecanice
pot fi corectate grafic prin intersectia
caracteristicii mecanice ![]() cu curba cuplului rezistent
cu curba cuplului rezistent ![]() , (fig. 4.6).
, (fig. 4.6).
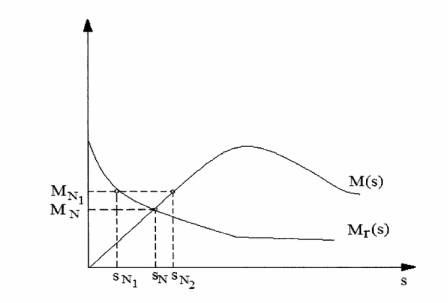
Fig. 4.6
Avand in vedere ca in
domeniul alunecarilor nominale, caracteristica nominala si curba cuplului
rezistent sunt mai apropiate de dreapta, se pot corecta valorile ![]() si
si ![]() si analitic.
si analitic.
Din expresia lui ![]() se obtine legatura
se obtine legatura ![]()
![]()
Daca ![]() este alunecarea nominala adoptata anterior,
este alunecarea nominala adoptata anterior, ![]() este cuplul rezistent corespunzator alunecarii
este cuplul rezistent corespunzator alunecarii
![]() , iar
, iar ![]() este alunecarea la care giroscopul proiectat
dezvolta cuplul
este alunecarea la care giroscopul proiectat
dezvolta cuplul ![]() , atunci
valoarea reala a alunecarii este:
, atunci
valoarea reala a alunecarii este:
![]()
iar cuplul nominal ![]() este dezvoltat in realitate.
este dezvoltat in realitate.
Alunecarea ![]() se obtine din
se obtine din ![]()
4.5 Caracteristici de functionare
Implica
determinarea curentului absorbit ![]() , a puterii
, a puterii ![]() , a
randamentului
, a
randamentului ![]() si a factorului de putere
si a factorului de putere ![]() in functie de alunecare sau turatie.
in functie de alunecare sau turatie.
Curentul absorbit:
![]()
![]()
![]()
Curentul nominal si curentul de pornire se determina prin inlocuirea lui ![]() cu
cu ![]() , respectiv cu
, respectiv cu ![]()
![]()
![]()
Puterea absorbita:
![]()
![]()
Puterea nominala si
puterea la pornire se determina prin inlocuirea lui ![]() si
si ![]() cu 1.
cu 1.
![]()
Pierderile electromagnetice
in infasurari ![]() si fier
si fier ![]()
![]()
Puterea utila este data de relatia:
![]()
Puterea utila nominala:
![]()
![]()
Pierderile in infasurarea statorului:
![]()
Pierderile in infasurarea rotorului:
![]()
Randamentul corespunzator regimului nominal:
![]()
Factorul de putere in regim nominal:
![]()
Alunecare nominala optima:
Calculul timpului de pornire:

4.6 Trasarea caracteristicilor giromotorului
Pentru trasarea
caracteristicilor giromotorului am exprimat mai intai toate caracteristicile in
functie de alunecarea ![]()
![]()
Avand toate elementele calculate anterior va rezulta:
![]()
![]()
![]()
Curentul absorbit ![]()
![]()
Introducand in ![]() toate datele cunoscute, va rezulta:
toate datele cunoscute, va rezulta:

Puterea absorbita ![]()
![]()
![]()
Puterea ![]()
![]()
![]()
Randamentul:
![]()
Cunoscand caracteristicile
giromotorului calculate ca functie de alunecare ![]() , folosind
MATLAB_ul, am realizat un program pentru calcularea valorilor expresiilor de
mai sus cu
, folosind
MATLAB_ul, am realizat un program pentru calcularea valorilor expresiilor de
mai sus cu ![]() ce poate lua valori de la
ce poate lua valori de la ![]() pana la
pana la ![]() cu pasul de
cu pasul de ![]() , dupa care se
realizeaza graficele corespunzatoare functiilor:
, dupa care se
realizeaza graficele corespunzatoare functiilor:
%trasarea caracteristicilor giromotorului de direcþie proiectat
S=0:0.01:1;
for k=1:1:101;
Mr(k)=0.2203*(1-S(k));
Ms(k)=0.3062*S(k)/(S(k)^2+0.0354*S(k)+0.0422);
P1N(k)=(8.9233*S(k)^2+8.8406*S(k)+0.031)/(S(k)^2+0.00354*S(k)+0.0422);
P2(k)=43.3*Ms(k)*(1-S(k));
I1(k)=[(0.2651*S(k)^2+0.00324*S(k)+0.00011)/(S(k)^2+0.2672*S(k)+0.0422)]^2;
ITA(k)=P2(k)/P1N(k);
end
disp('S P1N P2 I1 Mr Ms ITA'
VAL=[S',P1N',P2',I1',Mr',Ms',ITA'];
figure(
plot(S,P1N)
xlabel('valoarea alunecarii S'
ylabel('P1N[W]'
title('GRAFICUL PUTERII P1N'
figure(
plot(S,P2)
xlabel('valoarea alunecarii S'
ylabel('P2[W]'
title('GRAFICUL PUTERII P2'
figure(
plot(S,I1)
xlabel('valoarea alunecarii S'
ylabel('I1[A]'
title('GRAFICUL CURENTULUI ABSORBIT'
figure(
plot(S,Mr)
xlabel('valoarea alunecarii S'
ylabel('Mr[N*cm]'
title('GRAFICUL CARACTERISTICII MECANICE Mr'
figure(
plot(S,Ms)
xlabel('valoarea alunecarii S'
ylabel('Ms[N*cm]'
title('GRAFICUL CARACTERISTICII MECANICE Ms'
figure(
plot(S,ITA)
xlabel('valoarea alunecarii S'
ylabel('ITA'
title('GRAFICUL RANDAMENTULUI'
figure(
plot(S,P1N,S,P2,S,Mr,S,Ms,S,ITA)
xlabel('valoarea alunecarii S'
ylabel('P1,P2,Mr,Ms,ITA'
title('GRAFICELE CARACTERISTICILOR P1N,P2,Mr,Ms,ITA'
S
P1N
P2
I1
Mr
Ms
ITA
0.7346 0 0.0000 0.2203 0 0
0.0100 2.8416 3.0773 0.0000 0.2181 0.0718 1.0830
0.0200 4.9538 6.0004 0.0000 0.2159 0.1414 1.2113
0.0300 7.0418 8.7365 0.0001 0.2137 0.2080 1.2407
0.0400 9.0780 11.2598 0.0001 0.2115 0.2709 1.2403
0.0500 11.0377 13.5523 0.0003 0.2093 0.3295 1.2278
0.0600 12.9000 15.6034 0.0004 0.2071 0.3834 1.2096
0.0700 14.6483 17.4095 0.0006 0.2049 0.4323 1.1885
0.0800 16.2706 18.9731 0.0009 0.2027 0.4763 1.1661
0.0900 17.7589 20.3019 0.0012 0.2005 0.5152 1.1432
0.1000 19.1097 21.4076 0.0015 0.1983 0.5493 1.1202
0.1100 20.3227 22.3048 0.0019 0.1961 0.5788 1.0975
0.1200 21.4006 23.0097 0.0024 0.1939 0.6039 1.0752
0.1300 22.3485 23.5398 0.0029 0.1917 0.6249 1.0533
0.1400 23.1731 23.9127 0.0034 0.1895 0.6422 1.0319
0.1500 23.8823 24.1459 0.0039 0.1873 0.6560 1.0110
0.1600 24.4847 24.2559 0.0045 0.1851 0.6669 0.9907
0.1700 24.9894 24.2585 0.0051 0.1828 0.6750 0.9708
0.1800 25.4053 24.1682 0.0057 0.1806 0.6807 0.9513
0.1900 25.7411 23.9983 0.0064 0.1784 0.6842 0.9323
0.2000 26.0054 23.7607 0.0070 0.1762 0.6859 0.9137
0.2100 26.2058 23.4662 0.0077 0.1740 0.6860 0.8955
0.2200 26.3499 23.1243 0.0084 0.1718 0.6847 0.8776
0.2300 26.4443 22.7434 0.0090 0.1696 0.6821 0.8601
0.2400 26.4951 22.3309 0.0097 0.1674 0.6786 0.8428
0.2500 26.5081 21.8931 0.0104 0.1652 0.6742 0.8259
0.2600 26.4881 21.4356 0.0111 0.1630 0.6690 0.8093
0.2700 26.4396 20.9633 0.0118 0.1608 0.6632 0.7929
0.2800 26.3667 20.4802 0.0124 0.1586 0.6569 0.7767
0.2900 26.2728 19.9897 0.0131 0.1564 0.6502 0.7609
0.3000 26.1611 19.4950 0.0138 0.1542 0.6432 0.7452
0.3100 26.0343 18.9985 0.0145 0.1520 0.6359 0.7297
0.3200 25.8949 18.5024 0.0151 0.1498 0.6284 0.7145
0.3300 25.7450 18.0084 0.0158 0.1476 0.6207 0.6995
0.3400 25.5864 17.5181 0.0164 0.1454 0.6130 0.6847
0.3500 25.4209 17.0326 0.0171 0.1432 0.6052 0.6700
0.3600 25.2497 16.5530 0.0177 0.1410 0.5973 0.6556
0.3700 25.0741 16.0800 0.0183 0.1388 0.5895 0.6413
0.3800 24.8953 15.6144 0.0189 0.1366 0.5816 0.6272
0.3900 24.7141 15.1566 0.0195 0.1344 0.5738 0.6133
0.4000 24.5313 14.7071 0.0201 0.1322 0.5661 0.5995
0.4100 24.3477 14.2661 0.0207 0.1300 0.5584 0.5859
0.4200 24.1637 13.8338 0.0213 0.1278 0.5508 0.5725
0.4300 23.9801 13.4105 0.0218 0.1256 0.5434 0.5592
0.4400 23.7971 12.9960 0.0224 0.1234 0.5360 0.5461
0.4500 23.6151 12.5905 0.0229 0.1212 0.5287 0.5332
0.4600 23.4345 12.1940 0.0235 0.1190 0.5215 0.5203
0.4700 23.2556 11.8063 0.0240 0.1168 0.5145 0.5077
0.4800 23.0785 11.4275 0.0245 0.1146 0.5075 0.4952
0.4900 22.9035 11.0573 0.0250 0.1124 0.5007 0.4828
0.5000 22.7306 10.6958 0.0255 0.1102 0.4940 0.4705
0.5100 22.5601 10.3426 0.0260 0.1079 0.4875 0.4584
0.5200 22.3920 9.9977 0.0265 0.1057 0.4810 0.4465
0.5300 22.2265 9.6609 0.0270 0.1035 0.4747 0.4347
0.5400 22.0635 9.3320 0.0274 0.1013 0.4685 0.4230
0.5500 21.9031 9.0108 0.0279 0.0991 0.4624 0.4114
0.5600 21.7453 8.6972 0.0283 0.0969 0.4565 0.4000
0.5700 21.5902 8.3910 0.0288 0.0947 0.4507 0.3886
0.5800 21.4377 8.0920 0.0292 0.0925 0.4450 0.3775
0.5900 21.2880 7.7999 0.0296 0.0903 0.4394 0.3664
0.6000 21.1408 7.5147 0.0300 0.0881 0.4339 0.3555
0.6100 20.9963 7.2361 0.0304 0.0859 0.4285 0.3446
0.6200 20.8545 6.9640 0.0308 0.0837 0.4232 0.3339
0.6300 20.7152 6.6982 0.0312 0.0815 0.4181 0.3233
0.6400 20.5785 6.4384 0.0316 0.0793 0.4130 0.3129
0.6500 20.4442 6.1846 0.0320 0.0771 0.4081 0.3025
0.6600 20.3125 5.9366 0.0324 0.0749 0.4032 0.2923
0.6700 20.1833 5.6941 0.0328 0.0727 0.3985 0.2821
0.6800 20.0564 5.4571 0.0331 0.0705 0.3938 0.2721
0.6900 19.9319 5.2254 0.0335 0.0683 0.3893 0.2622
0.7000 19.8097 4.9989 0.0338 0.0661 0.3848 0.2523
0.7100 19.6899 4.7773 0.0342 0.0639 0.3804 0.2426
0.7200 19.5722 4.5606 0.0345 0.0617 0.3762 0.2330
0.7300 19.4568 4.3486 0.0348 0.0595 0.3720 0.2235
0.7400 19.3435 4.1411 0.0352 0.0573 0.3678 0.2141
0.7500 19.2323 3.9382 0.0355 0.0551 0.3638 0.2048
0.7600 19.1231 3.7395 0.0358 0.0529 0.3598 0.1955
0.7700 19.0160 3.5450 0.0361 0.0507 0.3560 0.1864
0.7800 18.9108 3.3546 0.0364 0.0485 0.3522 0.1774
0.7900 18.8076 3.1682 0.0367 0.0463 0.3484 0.1685
0.8000 18.7063 2.9856 0.0370 0.0441 0.3448 0.1596
0.8100 18.6068 2.8068 0.0373 0.0419 0.3412 0.1508
0.8200 18.5091 2.6316 0.0376 0.0397 0.3376 0.1422
0.8300 18.4132 2.4600 0.0379 0.0375 0.3342 0.1336
0.8400 18.3190 2.2918 0.0381 0.0352 0.3308 0.1251
0.8500 18.2264 2.1269 0.0384 0.0330 0.3275 0.1167
0.8600 18.1356 1.9653 0.0387 0.0308 0.3242 0.1084
0.8700 18.0463 1.8069 0.0389 0.0286 0.3210 0.1001
0.8800 17.9586 1.6515 0.0392 0.0264 0.3178 0.0920
0.8900 17.8724 1.4992 0.0395 0.0242 0.3148 0.0839
0.9000 17.7878 1.3498 0.0397 0.0220 0.3117 0.0759
0.9100 17.7046 1.2032 0.0400 0.0198 0.3087 0.0680
0.9200 17.6228 1.0593 0.0402 0.0176 0.3058 0.0601
0.9300 17.5425 0.9182 0.0404 0.0154 0.3029 0.0523
0.9400 17.4635 0.7797 0.0407 0.0132 0.3001 0.0446
0.9500 17.3858 0.6437 0.0409 0.0110 0.2973 0.0370
0.9600 17.3095 0.5103 0.0411 0.0088 0.2946 0.0295
0.9700 17.2344 0.3792 0.0414 0.0066 0.2919 0.0220
0.9800 17.1606 0.2505 0.0416 0.0044 0.2893 0.0146
0.9900 17.0880 0.1241 0.0418 0.0022 0.2867 0.0073
1.0000 17.0166 0 0.0420 0 0.2841 0
Dupa rularea programului se pot trage urmatoarele concluzii:
a)
timpul de pornire ![]() a rezultat in final ca fiind
a rezultat in final ca fiind ![]() , deci se
incadreaza in timpul propus initial de
, deci se
incadreaza in timpul propus initial de ![]() . O pornire mai
rapida se poate obtine folosind o tensiune
. O pornire mai
rapida se poate obtine folosind o tensiune ![]() de pornire mai mare decat
tensiunea nominala
de pornire mai mare decat
tensiunea nominala ![]()
b)
randamentul nominal obtinut este ![]() , avand o
valoare foarte buna luand in considerare faptul ca giromotoarele de acest tip
au in general un randament de
, avand o
valoare foarte buna luand in considerare faptul ca giromotoarele de acest tip
au in general un randament de ![]()
Giromotorul proiectat va avea un regim de functionare in continuu alimentat
la ![]() , cu frecventa
, cu frecventa ![]() in parametrii impusi.
in parametrii impusi.
4.7 Studiul actionarii cadrelor de urmarire
Erorile de directie provocate de erorile cardanice sunt inlaturate daca axa cadrului exterior al giroscopului de directie se mentine dupa directia verticalei la orice evolutie a avionului.
Aceasta corectie se realizeaza cu ajutorul a doua cadre suplimentare de urmarire in tangaj si inclinare in care se suspenda giroscopul de cap si cu un sistem de corectie intre cadre. Cadrul de urmarire in tangaj al giroscopului de directie are axa de rotatie paralela cu axa de rotatie a cadrului exterior a ansamblului giroscopic de verticala.
Acest cadru, la randul lui este suspendat in al doilea cadru de urmarire,
cadru care este comun pentru giroscopul de directie si pentru cel de verticala.
Cadrul de urmarire in tangaj trebuie sa urmareasca in permanenta verticala
aparenta, reducerea abaterilor cadrului de urmarire in tangaj se realizeaza pe
baza semnalelor date de selsinul transmitator. Acesta este montat pe axa de
rotatie a cadrului de tangaj al giroscopului de verticala, el masurand unghiul
de tangaj ![]() al avionului.
al avionului.
Selsinul receptor este montat pe axa de rotatie a cadrului de urmarire in tangaj a giroscopului de directie. Statorul aceluiasi selsin este fixat in rama cadrului de urmarire in inclinare.
Sistemul mai cuprinde motorul generator cu reductorul montat pe cadrul de urmarire in inclinare.
La abaterea cadrului de urmarire in tangaj de la verticala, apare un dezacord in rotorul selsinului receptor, acest semnal este preamplificat si trimis la bobina de comanda a motorului care roteste cadrul ansamblului de cap in sensul micsorarii semnalului de dezacord
Pentru amortizarea oscilatiilor cadrului de urmarire in tangaj se trimite semnal de la tahogenerator care se introduce in amplificator cu rol de reactie inversa negativa. Cadrul de urmarire in inclinare lucreaza dupa semnalul transmitatorului inductiv montat pe axa de rotatie a cadrului interior al giroscopului de verticala. Sistemul de urmarire cu doua cadre asigura orizontalitatea axei proprii de rotatie a giroscopului de directie, axa de suspensie a ramei cardanice exterioare a giroscopului fiind montat in rama de urmarire a tangajului.
Pentru mentinerea axului giroscopului de cap in pozitie orizontala se foloseste corectia intre cadre care asigura perpendicularitatea axei rotorului giroscopului de directie si a axei cadrului exterior de suspensie.
Pe axa cadrului interior este montat transmitatorul inductiv, al carui rotor este fixat pe cadrul interior, iar statorul pe cadrul exterior de suspensie. La abaterea de la pozitia orizontala a axului giroscopului de directie, de la bobinele de semnalizare ale transmitatorului inductiv se transmite un semnal de dezacord la intrarea amplificatorului.
Semnalul amplificat se trimite la bobinele de comanda ale transmitatorului de moment montat pe axa cadrului exterior a giroscopului de directie.
Giroscopul de directie, sub actiunea momentului dezvoltat de transmitatorul de moment va precesiona in sensul micsorarii semnalului de dezacord de la transmitatorul inductiv, stabilind astfel perpendicularitatea intre axa rotorului giroscopului de directie si axa cadrului exterior de suspensie, aducand axa rotorului giroscopului in plan orizontal.
Pentru excluderea pierderii unui grad de libertate al giroscopului de verticala din cauza suprapunerii axei de rotatie a cadrului exterior de suspensie cu axa de rotatie proprie a giroscopului, ansamblul giroscopic de verticala este suspendat de cadrul de cadrul de urmarire in inclinare.
Sistemul de urmarire aduce acest cadru in pozitia la care axa de rotatie a cadrului de suspensie exterior si axa proprie de rotatie a giroscopului sa fie in permanenta perpendiculare. Acest lucru se realizeaza cu un sistem de urmarire care primeste semnale de la transmitatorul inductiv (trimite un semnal) montat pe axa cadrului interior de suspensie. Rotorul este fixat pe ansamblul giroscopic, iar statorul la rama cadrului exterior.
La inclinarea axei de rotatie a cadrului interior fata de pozitia normala (perpendicular pe axa giromotorului), transmitatorul inductiv trimite un semnal proportional cu unghiul de dezacord la intrarea amplificatorului. Semnalul amplificat se trimite la bobina de comanda a motorului, care reduce dezacordul rotind prin intermediul reductorului linia de urmarire in inclinare pana cand axa cadrului exterior revine la pozitia perpendiculara pe axa rotorului giroscopului.
Viteza de compensare a dezacordului se alege astfel incat sa asigure
posibilitatea de schimbare a unghiului de inclinare a avionului cu o viteza
unghiulara de ![]()
Amortizarea oscilatiilor cadrului de urmarire in inclinare se asigura folosind un semnal de la tahomotor. Semnalul de la tahomotor, proportional cu viteza de rotatie a rotorului, se transmite la amplificator in calitate de semnal de reactie inversa, negativa, unde se sumeaza cu semnalul traductorului inductiv.
Pentru asigurarea sensului corect de actionare a
motorului generator asupra cadrului de urmarire in cazul unghiurilor de tangaj
ale avionului mai mari de ![]() , faza
semnalului de comanda al traductorului inductiv se comanda cu ajutorul unui
comutator amplasat pe axul exterior al canalului cardanic.
, faza
semnalului de comanda al traductorului inductiv se comanda cu ajutorul unui
comutator amplasat pe axul exterior al canalului cardanic.
Sensul corect de actionare a cadrului de urmarire este sensul opus
dezacordului. Astfel, daca unghiul dintre axul exterior al cadrului cardanic si
axa principala de rotatie a giroscopului a devenit de ![]() (dezacord de
(dezacord de ![]() ) se considera
ca sensul de actionare a motorului generator este corect dacaa acesta roteste
cadrul de urmarire in sensul reducerii acestui unghi pana la
) se considera
ca sensul de actionare a motorului generator este corect dacaa acesta roteste
cadrul de urmarire in sensul reducerii acestui unghi pana la ![]() , dupa ce se
ajunge la acest unghi motorul se opreste. Daca, din contra acest unghi devine de
, dupa ce se
ajunge la acest unghi motorul se opreste. Daca, din contra acest unghi devine de
![]() , motorul
generator va roti cadrul de urmarire in sensul maririi acestui unghi pana la
, motorul
generator va roti cadrul de urmarire in sensul maririi acestui unghi pana la ![]() , dupa care se
va opri.
, dupa care se
va opri.
In continuare vom prezenta un studiu al actionarii cadrelor de urmarire in diferite regimuri:
a) regim de pornire accelerata;
b) zbor apropiat de orizontala;
c) executarea manevrelor verticale.
Regim de pornire accelerata
Aducerea cadrului de urmarire in inclinare in pozitie orizontala in regim de pornire accelerata se realizeaza cu semnale de la selsinul transmitator de inclinare.
Releul de pornire prin contactele sale normal deschise, la cuplarea agregatului giroscopic, cupleaza la intrarea amplificatorului din sistemul de urmarire in inclinare, selsinul transmitator de inclinare, cu statorul fixat in corpul aparatului, iar rotorul pe axa cadrului de urmarire in inclinare.
La inclinarea cadrului de urmarire de la pozitia
lui normala, de la selsinul transmitator se trimite un semnal la intrarea
amplificatorului. Motorul generator aduce cadrul de urmarire in pozitie orizontala,
dupa ![]() releul de pornire este scos de sub tensiune si
regimul de pornire accelerata se incheie.
releul de pornire este scos de sub tensiune si
regimul de pornire accelerata se incheie.
Regimul de zbor orizontal
Dupa terminarea pornirii accelerate releele de pornire se scot de sub tensiune, iar contactele
lor normal inchise asigura urmatoarea interactiune a elementelor aparatului:
a) pendulele cu Hg au corectii longitudinale si transversale, se cupleaza la bobinele de comanda ale motoarelor de corectie.In afara de aceasta, contactele releului electronic de timp de decuplare a corectiei longitudinale se cupleaza in circuitul de alimentare a pendulului cu Hg al corectiei longitudinale.
b) cadrul de urmarire in inclinare se comanda dupa semnalul de la transmitatorul inductiv de inclinare. Dependenta intre tensiunea de pe bobinele de comanda ale motorului generator de aducere a cadrului de urmarire in inclinare in pozitie normala si cea a transmitatorului de unghi de pe cadrul interior de inclinare, este:
![]()
unde:
![]() - tensiunea de comanda a motorului generator;
- tensiunea de comanda a motorului generator;
![]() - coeficient de inclinare;
- coeficient de inclinare;
![]() - unghi de tangaj al avionului.
- unghi de tangaj al avionului.
Dependenta tensiunii la bobinele de comanda ale motorului de aducere la un unghi de tangaj zero se aplica prin cinematica suspensiei cardanice intre elementele sistemului de urmarire a cadrului de inclinare.
Vom avea ![]() si astfel se asigura caracteristicile statice
si dinamice ale sistemului in zbor cu unghiuri de tangaj
si astfel se asigura caracteristicile statice
si dinamice ale sistemului in zbor cu unghiuri de tangaj ![]()
Pozitia verticala a giroscopului este mentinuta cu ajutorul comutatoarelor pendulare cu Hg si a sistemelor de corectie, precum si cu ajutorul sistemului de urmarire si stabilizare a cadrului de inclinare la o tensiune minima a bobinelor de semnalizare ale transmitatorului inductiv.
La aparitia unghiurilor de inclinare a avionului are loc rotirea corpului sistemului cursoverticalului in raport cu cadrul de urmarire in inclinare, care prin selsinul transmitator, transforma unghiul de inclinare in semnal electric.
c)
bobina electromagnetului de blocare se cupleaza la ![]() si miezul electromagnetului se atrage indicand
limitatorul unghiului de rotatie a ramei cardanice exterioare in raport cu axa
de suspensie a cadrului de urmarire in inclinare.
si miezul electromagnetului se atrage indicand
limitatorul unghiului de rotatie a ramei cardanice exterioare in raport cu axa
de suspensie a cadrului de urmarire in inclinare.
Regimul de zbor vertical
Actionarea reciproca a elementelor electrice ale cursoverticalului la executarea manevrelor
verticale este necesara pentru a asigura comanda cadrului de urmarire in inclinare si indicarea pozitiei avionului in inclinare cu semnale de la transmitatorul inductiv.
Acest lucru se face efectiv la unghiuri de tangaj de ![]() , iar de la
unghiuri de tangaj
, iar de la
unghiuri de tangaj ![]()
![]() se utilizeaza comanda comutata a sistemului de
urmarire a cadrului de inclinare de la transmitatorul inductiv de la
regulatorul de cadre.
se utilizeaza comanda comutata a sistemului de
urmarire a cadrului de inclinare de la transmitatorul inductiv de la
regulatorul de cadre.
Destinatia regulatorului de cadre este de a forma semnale pentru comanda cadrului de urmarire in inclinare in zbor vertical.
Legea optima de comanda a cadrului de inclinare in functie de pozitia avionului in zbor pe verticala este data de relatia:
![]()
unde:
![]() - tensiunea de comanda a motorului generator;
- tensiunea de comanda a motorului generator;
![]() - semnul de abatere de la directia pe care o
avea avionul in momentul cuplarii regulatorului de cadre.
- semnul de abatere de la directia pe care o
avea avionul in momentul cuplarii regulatorului de cadre.
Forma semnalului transmis la regulatorul de cadre se realizeaza cu ajutorul a doua sisteme de urmarire in inclinare si tangaj. Ca transmitatori sunt folosite selsinele receptoare corespunzatoare din mecanismele de acordare din regulatorul de cadre.
Inmultirea semnalelor din sistemul de urmarire se face prin rotirea mecanismelor transformatorului de acordare a tangajului din regulatorul de cadre.
De la iesirea regulatorului de cadre, semnalul de comanda se transmite la amplificatorul din sistemul de urmarire al cadrului de inclinare. Folosirea semnalului de la selsinul de directie pentru comanda cadrului de inclinare in zbor apropiat de verticala este usoara, deoarece axa longitudinala a sistemului cursoverticalului si axa cadrului exterior al giroscopului de directie aproape coincid.
La cresterea in continuare
a unghiului de tangaj ![]() , regulatorul
de cadre ramane cuplat ti se decupleaza
dupa ce avionul trece in pozitie orizontala.
, regulatorul
de cadre ramane cuplat ti se decupleaza
dupa ce avionul trece in pozitie orizontala.
Pentru a actiona cadrul de urmarire in tangaj, vom alege un motor cu urmatoarele caracteristici:
tensiunea de excitatie, ![]()
tensiunea de comanda, ![]()
puterea la axul motorului, ![]()
cuplul dat de motor, ![]()
cuplul de pornire, ![]()
viteza de mers in gol, ![]()
Puterea la axul motorului de ![]() este suficienta deoarece considerand ca
puterea consumata in regim dinamic de reductor, in lagarele cadrului de
urmarire si contactele electrice de alimentare nu depasesc puterea necesara
accelerarii cadrului de urmarire impreuna cu nodul giroscopic pana la viteza de
rotatie necesara, rezulta:
este suficienta deoarece considerand ca
puterea consumata in regim dinamic de reductor, in lagarele cadrului de
urmarire si contactele electrice de alimentare nu depasesc puterea necesara
accelerarii cadrului de urmarire impreuna cu nodul giroscopic pana la viteza de
rotatie necesara, rezulta:
![]()
Momentul de inertie al
nodului giroscopic de directie cu cadru de urmarire nu depaseste ![]() si pentru ca motorul de actionare pentru un
astfel de sistem poate ajunge la viteza de regim in maxim o secunda, inseamna
ca viteza de rotatie a cadrului de urmarire va fi:
si pentru ca motorul de actionare pentru un
astfel de sistem poate ajunge la viteza de regim in maxim o secunda, inseamna
ca viteza de rotatie a cadrului de urmarire va fi:
Valoarea obtinuta este acoperitoare, deoarece in realitate aceasta viteza unghiulara de tangaj a avionului este doar de ordinul zecilor de grade pe secunda.
Statorul acestui motor
asincron bifazat cu comanda in amplitudine are o infasurare de excitatie si
doua de comanda, plasate in opozitie, la un unghi de ![]() fata de infasurarea de excitatie.
fata de infasurarea de excitatie.
Rotorul are bobinajul in scurtcircuit.
![]()
unde:
![]() - constanta motorului;
- constanta motorului;
![]() - viteza unghiulara la axul motorului;
- viteza unghiulara la axul motorului;
![]() - unghiul dintre infasurarea de comanda si cea
de excitatie;
- unghiul dintre infasurarea de comanda si cea
de excitatie;
![]() - se determinadin relatia vitezei unghiulare
de mers in gol.
- se determinadin relatia vitezei unghiulare
de mers in gol.
![]()
![]()
si introducand-o in relatia cuplului dat de motor la arborele sau, obtinem:
![]()
Daca ![]() adica este
alimentata o infasurare de comanda, cuplul la ax are un sens, iar daca
adica este
alimentata o infasurare de comanda, cuplul la ax are un sens, iar daca ![]() , adica este
alimentata cealalta infasurare de comanda, sensul cuplului se inverseaza,
viteza de rotatie depinzand de marimea tensiunii de comanda pentru un cuplu
constant.
, adica este
alimentata cealalta infasurare de comanda, sensul cuplului se inverseaza,
viteza de rotatie depinzand de marimea tensiunii de comanda pentru un cuplu
constant.
Pentru ![]() , cuplul de
pornire va fi:
, cuplul de
pornire va fi:
![]()
deci:
![]()
In regim stabilizat, puterea motorului este:
![]()
Raportul de transmisie al reductorului este:
![]()
rezulta:
![]()
Considerand ca in regim stabilizat ![]() nu depaseste
nu depaseste ![]()
![]()
![]()
![]()
![]()
![]()
Valoarea cuplului necesar
in regim stabilizat nu trebuie sa depaseasca valoare cuplului pe care il poate
da motorul conform caracteristicilor sale tehnice, ![]()
pentru ![]() , obtinem:
, obtinem:
![]()
deci corespunde.
pentru ![]() , rezulta:
, rezulta:
![]()
Aleg deci pentru raportul de transmisie al
reductorului o valoare rotunjita, ![]() , pentru care
rezulta valoarea reala a vitezei unghiulare a cadrului de urmarire pentru
tangaj:
, pentru care
rezulta valoarea reala a vitezei unghiulare a cadrului de urmarire pentru
tangaj:
![]()
![]()
![]()
![]()
![]()
Prima valoare este cea cautata, fiind apropiata de cea impusa initial.
Calculul erorilor
Elementul component esential al sistemului de curs il reprezinta giroscopul.
In acelasi timp el constituie principala sursa de erori a sistemului, din cauza deformatiilor elastice si neelastice. Datorita fluctuatiilor termice produse apar dilatari neuniforme ale pieselor, de unde rezulta momente perturbatoare.
Erorile giroscopului de curs si cauzele acestuia:
a) Eroarea cursului
![]()
Precizia de functionare a sistemului de curs depinde de precizia de functionare a giroscopului de curs, de stabilitatea lui in azimut. Gradul de stabilitate se apreciaza dupa valoarea derivei sale intr-un interval de timp.
Pentru imbunatatirea stabilitatii s-au luat urmatoarele masuri:
imbunatatirea calitatii compensarii alunecarii giroscopului;
imbunatatirea caracteristicilor dinamice si constructive ale giroscopului;
eliminarea cauzelor ce provoaca alunecarile girocopului si micsorarea influentei acestora
b) Erorile metodice ale girosemicompasurilor
Pentru a indica corect directia de zbor este necesar sa se introduca un semnal de forma:
![]() (in cazul zborului pe ortodroma).
(in cazul zborului pe ortodroma).
Considerand abaterea de la traiectul lateral pe o distanta caruia ii
corespunde un unghi la centru ![]() de valoare mica.
de valoare mica.
Deci aeronava zboara pe o
paralela la ortodroma careia ii corespunde o viteza unghiulara ![]()
![]()
Meridianul se roteste in azimut cu viteza:
![]()
Pentru ca giroscopul sa indice corect capul ortodromic trebuie rotit in
azimut cu ![]()
c) Eroarea de viraj a girosemicompasului
Daca inclinarea aeronavei este insoti si de acceleratii, se produc asa numitele
erori de viraj ![]()
Aceste erori se datoresc corectiei orizontale a girosemicompasului care,
sub influenta acceleratiilor, determina precizia giroscopului intr-un plan care
trece prin axa inelului exterior de suspensie. Aceasta precesie este insotita
si de o deviere a giroscopului in azimut, de unde rezulta eroarea de viraj ![]() a aparatului.
a aparatului.
De mentionat ca o asemenea eroare se produce nu numai in timpul virajului, ci si dupa coborarea avionului daca evolutiile acestuia se fac cu acceleratii. De regula eroarea este mica, ea se anuleaza daca inelul exterior de suspensie este stabilizat dupa verticala locului.
d) Erori datorate variatiei parametrilor si impreciziei corectiei azimutale
Functionarea corecta a unui girosemicompas implica introducerea unei miscari de precesie in azimut de forma:
![]()
unde ![]() reprezinta panta reala a caracteristicii
reprezinta panta reala a caracteristicii ![]() a motorului corectiei de azimut,
iar
a motorului corectiei de azimut,
iar ![]() este latitudinea locului introdusa cu mijloacele
de la bord. Daca sunt indeplinite riguros conditiile
este latitudinea locului introdusa cu mijloacele
de la bord. Daca sunt indeplinite riguros conditiile ![]() si
si ![]() , atunci
precesia in azimut este corecta si nu se produc erori.
, atunci
precesia in azimut este corecta si nu se produc erori.
In functie de aceste abateri, eroarea de corectie in azimut are expresia:
![]()
Modul de prelucrare si transmitere a informatiilor la bord
Sistemele de transmisie la distanta sau sistemele de pozitionare asigura transmisia la distanta a unghiului de rotatie, respectiv a vitezei de rotatie a unui arbore de comanda la un arbore comandat. Generalizand, putem spune ca, constructia ansamblurilor giroscopice necesita in mod curent transmiterea la distanta a unui unghi de rotatie sau a unei viteze unghiulare.
Aceste marimi se refera fie de la axa de giroscopica la cadrele giroscopice. Transmiterea lor la distanta este necesara fie pentru utilizarea de catre un echipament de executie in cazul folosirii sistemelor giroscopice pentru stabilizarea miscarii.
Sistemele care permit transmiterea la distanta a unor deplasari sau viteze unghiulare, constituie sisteme de transmitere sincrona. Pentru transmisia sincrona se utilizeaza masini electrice speciale montate in scheme de "arbore electric".
Se evita astfel cuplajele mecanice care sunt voluminoase, putin robuste si cu o sensiblitate mica si timp de raspuns mare.Folosirea cuplajelor mecanice la distante mari si in zone cu accesibilitate redusa devine chiar imposibila.
Sistemele de transmisie sincrona folosesc in principiu un element emitator sau transmitator (E.E.) si un element receptor sau detector (E.R.).
Transmisie electrica Element receptor Element transmitator
![]()
![]()
![]()
![]()
![]()
Ambele elemente sunt constituite din masini electrice speciale avand o constructie identica, dar functia lor este inversa.
Elementul transmitator converteste deplasarea
unghiulara ![]() sau viteza unghiulara
sau viteza unghiulara ![]() intr-un semnal electric.
intr-un semnal electric.
Elementul receptor legat electric cu cel transmitator
realizeaza operatia inversa de transformare a semnalului electric intr-o
deplasare ![]() sau viteza unghiulara
sau viteza unghiulara ![]() identice cu cele aplicate la intrarea
emitatorului.
identice cu cele aplicate la intrarea
emitatorului.
In functie de elemntul emitator respectiv receptor, sistemele de transmisie la distanta se impart in doua categorii:
transmisii la distanta potentiometrice;
transmisii la distanta cu selsine.
Datorita capacitati sale de autosincronizare si a preciziei ridicate, sistemul de transmisie la
distanta cu selsine, comparat cu cel potentiometric este folosit pe o scara mai larga ca aparat indicator al unei rotatii sau ca dispozitiv de comanda la distanta a unei deplasari in sistemul de telecomanda, telemasura si telecontrol.
Ca urmare a acestui fapt realizez masurarea si transmiterea unghiurilor de ruliu si de tangaj al centralei de cap si de verticala cu ajutorul selsinelor.
Selsinele sunt micromasini electrice fara contacte de o constructie speciala, acestea asigurand in conditii bune cerintele sistemelor de transmisie sincrona ale ansamblurilor giroscopice.
Aceste cerinte sunt:
asigurarea unei transmisii precise a marimii unghiulare ![]()
timpul de raspuns foarte mic;
pornirea si oprirea prompta;
transmiterea semnalului electric in conditii optime la variatia sarcinii mecanice;
functionare in regim de perturbatii electromagnetice;
posibilitatea functionarii corecte in cazul unor linii de semnal lungi;
gabarit mic al elementelor componente;
fiabilitate ridicata;
Selsinele sunt functional asemanatoare magnesinelor, atat rotorul cat si statorul sunt realizate din tole de otel electrotehnic.
Selsinele au doua tipuri de infasurari electrice:
o infasurare de excitatie;
o infasurare de sincronizare, amplasata in crestaturi.
In fig. 5.1 sunt prezentate schemele unui selsin cu excitatia pe rotor (a) si a unui selsin cu excitatie pe stator (b).
Fig. 5.1
Selsinele se utilizeaza in trei regimuri:
regim indicator;
regim transformator;
regim diferential.
Utilizarea selsinelor ca elemente de transmisie sincrona la ansamblurile giroscopice, necesita scheme de interconectare a acestora in regim de indicator. Infasurarile de excitatie de pe rotoare se alimenteaza cu o tensiune alternativa monofazata. Infasurarile de sincronizare sunt conectate intre ele.
Unghiurile electrice dintre directiile rotoarelor si directiile
infasurarilor de referinta ![]() si
si ![]()
![]() si
si ![]() trebuie sa fie egale pentru ca sistemul sa fie
in echilibru. In cazul in care selsinele functioneaza in regim de transformator,
marimea de iesire a selsinului receptor este o tensiune care se aplica la
intrarea unui amplificator de putere dupa care se actioneaza un servomotor
pentru anularea lui
trebuie sa fie egale pentru ca sistemul sa fie
in echilibru. In cazul in care selsinele functioneaza in regim de transformator,
marimea de iesire a selsinului receptor este o tensiune care se aplica la
intrarea unui amplificator de putere dupa care se actioneaza un servomotor
pentru anularea lui ![]()
In functionarea selsinelor apar doua tipuri de erori:
erori statice, cand selsinele nu se rotesc;
erori dinamice, cand selsinele se rotesc.
|
