Deplasarea autovehiculului în conditiile cerute de performante în ceea ce piveste dinamicitatea, consumul de combustibil, siguranta si confortul calatoriei, cerinte ce impun anumite reguli si elemente constructive, presupune cunoasterea influentelor exterioare ce se opun înaintarii autovehiculului.
Definirea conditiilor de autopropulsare, care precede calcul de tractiune, împreuna cu care conditioneaza performantele autovehiculului, cuprinde precizarea, functie de tipul, caracteristicile si destinatia autovehiculului, a cauzelor fizice pentru fortele de rezistenta ce actioneaza asupra autovehiculului, a factorilor specifici de influenta si stabileste relatiile analitice de evaluare cantitativa a acestor forte.
În procesul autopropulsarii autovehiculului, asupra acestuia actioneaza, dupa directia vitezei de deplasare, doua tipuri de forte:
3.1. Rezistenta la rulare
3.1.1. Generarea rezistentei la rulare
Rezistenta la rulare, Rr, este o forta cu actiune permanenta datorata exclusiv rostogolirii rotilor pe cale, si este de sens opus sensului de deplasare al automobilului.
Cauzele fizice ale rezistentei la rulare sunt:
Pentru calculele ingineresti simple se poate adopta valoarea coeficientului rezistentei la rulare în functie de calitatea drumului pe care se deplaseaza autovehiculul, dupa recomandarile din tabelul 3.1.
Tabelul 3.1. Valori medii ale coeficientului rezistentei la rulare.
|
Natura caii |
Starea caii |
Coeficientul de rezistenta la rulare | ||||
|
Asfalt sau beton |
buna |
| ||||
|
satisfacatoare |
| |||||
|
sosea pietruita |
buna |
| |
stare buna |
| |
|
cu hârtoape |
| |
uscata batatorita |
| ||
|
dupa ploaie |
| |||||
|
desfundat |
| |||||
|
Drum cu gheata sau gheata |
|
| |
afânata |
| |
|
batatorita |
|
În situatia în care este necesara determinarea puterii necesare autopropulsarii autovehiculului cu viteza maxima pentru situatia deplasarii pe un drum din asfalt sau beton coeficientul rezistentei la rulare poate fi determinat cu ajutorul graficului din figura 3.2.

Fig.3.2. Determinarea coeficeintului rezistentei la rulare
Pentru a se studia modul în care rezistenta la rulare influenteaza comportamentul dinamic al autovehiculului de proiectat pentru determinarea coeficientului rezistentei la rulare se pot folosi diverse relatii empirice de calcul.
Cele mai simple dintre formule utilizate pun în evidenta viteza de deplasare sub forma [XX]:
![]() (3.5)
(3.5)
unde f0 este coeficientul de rezistenta la rulare pentru viteza nula, si foj, j=1,2,3 sunt coeficienti dintre care unii pot fi nuli. Ca exemplificare se prezinta în valori ale acestor coeficienti (tabelul 3.2)
Tabelul 3.2. Parametrii pentru calculul coeficientului de rezistenta la rulare.
Tipul pneului |
|
|
|
|
|
|
Radial |
Cord metalic |
|
|
|
|
|
Cord textil |
|
|
|
|
|
|
Radial |
Sectiune foarte joasa |
|
|
|
|
|
Sectiunea joasa |
|
|
|
|
|
|
Superbalon |
|
|
|
|
|
Tot o relatie în care este pusa în evidenta numai viteza de deplasare este[xx]:
![]()
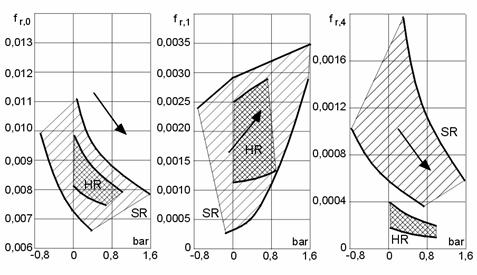
ai
carei coeficienti se aleg cu ajutorul diagramelor din figura 3.3.
Figura 3.3. Coeficientii fr,0, fr,1, fr,4
O alta relatie de calcul este [XX]:
![]() (3.7)
(3.7)
sau [xx}:
![]() (3.8)
(3.8)
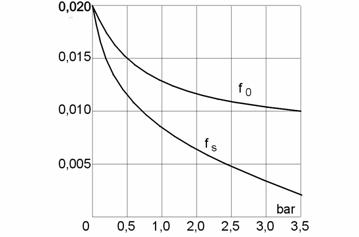
unde v
este in km/h iar coeficientii se aleg cu ajutorul diagramei din figura 3.4
Fig.3.4. Coeficientii f0, fs
Pentru cazul în care se considera si presiunea din pneu relatiile de calcul sunt [XX}:
![]() (3.9)
(3.9)
sau pentru determinarea direct a puterii necesare pentru învingerea rezistentei la rulare a rotii [XX]:
![]() (3.10)
(3.10)
În figura 3.5 sunt reprezentate valorile obtinute prin evaluarea coeficientului rezistentei la rulare cu ajutorul relatiilor (3.5), (3.6), (3.7), (3.8)
Relatia (3.5) devine dupa alegea coeficientilor:
![]() ;
;
relatia (3.6) devine:
![]()
relatia (3.8) devine:
![]()
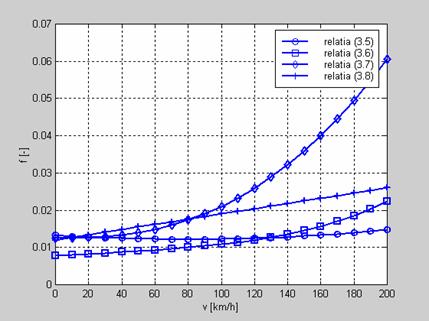
Fig.3.5. Variatia coeficientului rezistentei la rulare
în functie de viteza de deplasare a autovehiculului
Cu exceptia rezultatelor obtinute cu ajutorul relatiei (3.7) se constata pentru relatiile (3.5), (3.6), (3.8) o buna similitudine între rezultatele obtinute.
Astfel pentru determinarea coeficientului rezistentei la rulare se recomanda utilizarea uneia dintre relatiile (3.5), (3.6), (3.8), în functie de datele cunoscute legat de alegerea coeficientilor acestor expresii.
Pentru întreg automobilul relatiile de calcul ale fortei si puterii necesare învingerii rezistentei la rulare sunt:
![]() [daN] (3.11)
[daN] (3.11)
unde i=1,2.Nr; fi este coeficientul rezistentei la rulare pentru roata i, Zri este reactiunea normala la roata i, iar Nr este numarul de roti al autovehiculului.
Date fiind dificultatile utilizarii relatiei (3.11.) se considera f=fI=const.
Astfel relatia devine:
![]() [daN] (3.12)
[daN] (3.12)
unde Ga este greutatea autovehiculului iar a este unghiul de înclinare longitudinala a drumului.
Puterea necesara învingerii acestei rezistente se calculeaza cu relatia:
![]() [kW] (3.13)
[kW] (3.13)
unde v este viteza exporimata în m/s sau:
![]() [kW] (3.14)
[kW] (3.14)
unde V este viteza autovehiculului exprimata în km/h.
3.2. Rezistenta aerului.
3.2.1. Notiuni de aerodinamica autovehiculului.
Aerodinamica autovehiculelor se ocupa de fenomenele care se produc la interactiunea dintre autovehicul si aerul înconjurator si foloseste principiile generale ale aerodinamicii teoretice. In cadrul aerodinamicii autovehiculelor se stabilesc fortele si momentele ce actioneaza, din partea aerului în repaus sau în miscare, asupra autovehiculelor aflate în misare. De asemenea se analizeaza caile de modificare a interactiunii dintre aer si autovehicul astfel încât sa se îmbunatateasca performantele acestora.
Aerodinamica autovehiculelor studiaza cu precadere urmatoarele aspecte:
3.3. Rezistenta la panta.
La deplasarea autovehiculului pe cai cu înclinare longitudinala,forta de greutate genereaza o componenta Rp dupa directia deplasarii data de relatia :
![]() (3.19)
(3.19)
Aceasta forta este forta de rezistenta la urcarea pantelor (de sens opus vitezei de deplasare) si forta activa la coborârea pantelor.
Pentru pante cu înclinari
mici (![]() ) la care eroarea aproximarii
) la care eroarea aproximarii ![]() este sub 5% panta se exprima în procente:
este sub 5% panta se exprima în procente:
![]()
În acest caz expresia rezistentei la panta este data de relatia:
![]() (3.20)
(3.20)
Alegerea unghiului de înclinare longitudinala a caii se face functie de tipul si destinatia automobilului (tabelul 3.4).
Tabelul 3.4. Valori medii si maxime ale unghiului de înclinare longitudinala a caii
|
Tipul autovehiculului |
Valori medii |
Valori maxime admise |
|
Autovehicule cu o singura punte motoare |
|
|
|
Autovehicule cu doua punti motoare |
|
|
Deoarece rezistenta la
rulare cât si rezistenta la panta sunt determinate de starea
si caracteristicile caii de rulare, se foloseste gruparea celor
doua forte într-o forta de rezistenta totala
a caii ![]() , data de relatia
, data de relatia
![]() (3.21)
(3.21)
unde ![]() este coeficientul rezistentei totale a
caii de rulare.
este coeficientul rezistentei totale a
caii de rulare.
3.4. Rezistenta la demarare.
Regiurile tranzitorii ale miscarii autovehiculului sunt caractrizate de sporiri ale vitezei (demarari) si reduceri ale vitezei (frânari). Rezistenta la demarare (Rd) este o forta de rezistenta ce se manifesta în regimul de miscare accelerata a autovehiculului.
Ca urmare a legaturilor cinematice determinate în lantul cinematic al transmisiei dintre motor si rotile motoare, sporirea vitezei de translatie a autovehiculului se obtine prin sporirea vitezelor unghiulare de rotatie ale elementelor transmisiei si rotilor. Masa autovehiculului în miscare de translatie capata o acceleratie liniara iar piesele în rotatie acceleratii unghiulare.
Influenta asupra inertiei în translatie a pieselor aflate în rotatie se face printr-un coeficient d, numit coeficientul de influenta al maselor în miscare de rotatie.
Rezistenta la demarare este astfel data de relatia:
![]() (3.22)
(3.22)
unde: ma este masa autovehiculului [kg]
d este coeficientul de influenta al maselor aflate în miscare de rotatie;
![]() acceleratia miscarii de
translatie a autovehiculului [m/s2].
acceleratia miscarii de
translatie a autovehiculului [m/s2].
Pentru calculul rezistentei la demarare este necesara cunoasterea marimii coeficientului de influenta al maselor în miscare de rotatie.
Ca metode de alegere a marimii coeficientului de influenta a pieselor în miscare de rotatie, bibliogafie se specialitate recomanda mai multe metode:
3.5.Exemplu de calcul
Dupa alegerea parametrilor pricipali ai autovehiculului, în urma efectuarii studiului solutiilor similare rezistentele la înaintare sunt:
V [km/h] Rr [N] Pr [kW]
3.6. Ecuatia generala de miscare rectilinie a automobilului.
Pentru stabilirea ecuatiei generale de miscare se considera automobilul în miscare rectilinie, pe o cale cu înclinare a, în regim tranzitoriu de viteza cu acceleratie pozitiva.
Echilibrul dinamic al automobilului este date de bilantul de tractiune, care reprezinta ecuatia de echilibru dupa directia vitezei automobilului, de forma:
![]() [N] (3.24)
[N] (3.24)
în care: ![]() este forta activa;
este forta activa;
![]() - rezistentele la înaintare.
- rezistentele la înaintare.
Bilantul de tractiune exprima egalitatea dintre forta totala la roata - obtinuta prin însumarea fortelor tangentiale de la toate rotile motoare - si suma rezistentelor la înaintarea autovehiculelor, de unde rezulta:
![]() (3.25)
(3.25)
sau:
![]() (3.26)
(3.26)
în care forta FR numita forta la roata reprezinta actiunea momentului motor asupra rotilor. Expresia analitica a acestei forte este:
![]() (3.27)
(3.27)
unde:
M este momentul dintr-un punct de pe caracteristica exterioara corespunzator unei turatii n a motorului;
P este puterea în aceleasi conditii;
![]() este randamentul transmisiei;
este randamentul transmisiei;
itr este raportul de transmitere al transmisiei;
rr este raza de rulare a rotilor;
v este viteza de deplasare a automobilului.
În functie de conditiile de autopropulsare ale automobilului, din ecuatia de miscare (3.25) se definesc mai multe forme particulare si anume:
a) Deplasarea cu viteza maxima.
Prin conventie "viteza maxima"
este cea mai mare valoare a vitezei cu care automobilul se poate deplasa pe o
cale orizontala. Ca urmare în conditiile vitezei maxime când ![]() si
si ![]() din expresia ecuatiei de miscare
data de relatia (3.25) se obtine forma particulara
din expresia ecuatiei de miscare
data de relatia (3.25) se obtine forma particulara
![]() (3.28)
(3.28)
b) Deplasarea pe calea cu înclinare longitudinala maxima sau pe calea cu rezistenta specifica minima.
Deplasarea pe panta maxima (sau pe
cale cu rezistenta specifica maxima) se obtine când
întreaga forta disponibila este utilizata pentru învingerea
rezistentelor legate de tipul si caracteristicile drumului ![]() . Pentru
acest caz, având în vedere si faptul ca la viteze mici, specifice
deplasarii automobilului pe panta maxima, rezistenta aerului
este neglijabila in raport cu celelate forte din expresia fortei
la roata data de relatia (3.26) se obtine forma
particulara:
. Pentru
acest caz, având în vedere si faptul ca la viteze mici, specifice
deplasarii automobilului pe panta maxima, rezistenta aerului
este neglijabila in raport cu celelate forte din expresia fortei
la roata data de relatia (3.26) se obtine forma
particulara:
![]() N
N
c) Pornirea de pe loc cu acceleratia maxima
Pornirea de pe loc cu acceleratia
maxima se obtine în conditia în care intreaga forta
disponibila se utilizeaza pentru sporirea vitezei automobilului,
situatie ce corespunde pornirii din loc (![]() ) pe cale orizontala (
) pe cale orizontala (![]() ). Pentru acest caz, de autopropulsare
pe cale orizontala cu pornire din
loc (rezistenta aerului este nula) expresia fortei la roata
data de relatia (3.25) se reduce la forma particulara
). Pentru acest caz, de autopropulsare
pe cale orizontala cu pornire din
loc (rezistenta aerului este nula) expresia fortei la roata
data de relatia (3.25) se reduce la forma particulara
![]() N (3.30)
N (3.30)
unde:
![]() este acceleratia
maxima în treapta I.
este acceleratia
maxima în treapta I.
|
