Echilibrarea rotilor
Gradul de dezechilibrare a rotii, important parametru de diagnosticare, precizeaza starea tehnica a acestui ansamblu din punctul de vedere al echilibrarii sale.
Dezechilibrarea rotilor se poate datora atat procesului de fabricatie, cat si exploatarii. Din fabricatie rotile pot iesi cu imperfectiuni de echilibrare datorate neomogenitatii materialelor, abaterilor dimensionale, existenta valvei etc. De aceea, toate rotile noi trebuie echilibrate. Simptome de dezechilibrare mai apar si in urma utilizarii normale a automobilului, cand rotile se uzeaza neuniform, in urma interventiilor efectuate asupra camerei sau anvelopei, prin aplicarea de mansoane, prin modificarea pozitiei unghiulare a anvelopei la inlocuirea camerei, la reconditionarea jantei etc.
Exploatarea automobilelor cu roti neechilibrate este legata de riscul deteriorarii rulmentilor si amortizoarelor, de inrautatirea tinutei de drum si a securitatii circulatiei. Automobilul prezinta vibratii periculoase si. la o anumita viteza, rotile nu mai mentin contactul permanent si ferm cu solul, directia prezinta nesiguranta iar eficienta franelor se reduce.
5.2.1. Teoria echilibrarii
O roata de automobil este dezechilibrata static atunci cand centrul ei de greuta 454j94e te G (fig.5.6) este deplasat in raport cu centrul de rotatie O. Din acest motiv, in timpul mersului lagarul rotii este solicitat de forta centrifuga C:
![]()
relatie in care m este masa
neechilibrata a rotii; r - distanta de la punctul de aplicare al acestei
mase la centrul de rotatie; ![]() - viteza
unghiulara a rotii. Daca centrul de greutate al rotii se afla deplasat si
lateral, la distanta a fata de planul de simetrie longitudinal al rotii, atunci apare si un cuplu M:
- viteza
unghiulara a rotii. Daca centrul de greutate al rotii se afla deplasat si
lateral, la distanta a fata de planul de simetrie longitudinal al rotii, atunci apare si un cuplu M:
![]()
de semn variabil, care antreneaza roata in oscilatii directionale, facand-o sa ruleze serpuit pe sol. In afara de acestea, forta neechilibrata C produce un cuplu suplimentar in raport cu axul fuzetei, determinand miscari oscilatorii periculoase ale rotilor directoare. In acest caz se spune ca roata este dezechilibrata dinamic.
Reducand ansamblul vehicul-suspensie-roata la un sistem fizic reprezentat schematic in figura 5.7, proiectia de forte pe axa verticala conduce la urmatoarea ecuatie de echilibru:
![]()
In care: ![]() -
componenta pe verticala a fortei neechilibrate;
-
componenta pe verticala a fortei neechilibrate;
kx forta de elasticitate a arcului suspensiei;
cx rezistenta amortizorului;
mrx forta de inertie a rotii, mr fiind masa acesteia;
l timpul.
Solutia ecuatiei precedente are forma:
![]()
unde:
![]()
este defazajul dintre forta perturbatoare si axa Ox.
Amplitudinea acestei miscari oscilatorii este, prin urmare:
![]()
de unde rezulta ca
intensitatea perturbatiei creste proportional cu masa neechilibrata si cu
turatia (prin intermediul vitezei unghiulare a rotii ![]() ). La un
anumit regim de viteza si pentru un pneu dat, masa neechilibrata poate fi
apreciata prin masurarea amplitudinii miscarii oscilatorii pe care o provoaca.
). La un
anumit regim de viteza si pentru un pneu dat, masa neechilibrata poate fi
apreciata prin masurarea amplitudinii miscarii oscilatorii pe care o provoaca.
Prima conditie a echilibrarii este cea rezultata din echilibrul static al rotii, care impune aducerea centrului de greutate in axa de rotatie. Aceasta revine la adauga pe roata o masa aditionala ma egala cu masa neechilibrata m, operatie care se efectueaza folosind contragreutati de plumb care se prind pe bordul jantelor cu cleme elastice, in partea opusa prezentei masei m.
in acest caz roata va fi echilibrata static si se va mentine in echilibru stabil in orice pozitie unghiulara a sa, atunci cand va fi suspendata pe un ax orizontal.
Dinamic, insa, roata va continua sa ramana dezechilibrata, deoarece cuplul de dezechilibrare dinamica M continua sa existe. Pentru a fi echilirata dinamic, rotii trebuie sa i se aplice un cuplu bC
bC'=aC
egal cu cuplul de dezechilibrare, aplicand masa aditionala ma pe janta la o distanta b de planul median al rotii (fig. 5.8).
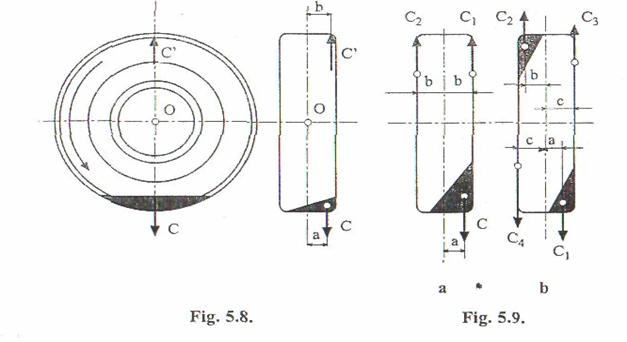
La rotile cu jante late, echilibrarea cu o singura contragreutate nu duce la rezultate satisfacatoare, fapt care impune plasarea a doua contragreutati aditionale, cate una pe fiecare flanc al jantei (fig. 5.9). Si intr-un caz si intr-altul se cere respectarea celor doua conditii fundamentale enuntate:
conditia de echilibru static:
C = C + C2 , in cazul din figura 5.9.a;
C + C4 = C2 + C3 , in cazul din figura 5.9.b;
conditia de echilibru dinamic:
aC = b(C - C2), in cazul din figura 5.9.a;
aC + bC2 = c(C3 + C4), in cazul din figura 5.9.b.
Din cele aratate rezulta ca pentru a echilibra o roata avand o janta cu dimensiuni cunoscute, este necesar sa se cunoasca valorile maselor neechilibrate si dispunerea unghiulara a centrelor de masa ale acestora, date care se obtin cu ajutorul masinilor de echilibrat.
5.2.2. Masini de echilibrat
5.2.2.1. Generalitati
Echilibrarea rotilor de automobil se poate face cu roata montata pe masina sau prin demontarea ei. Primul procedeu este mai comod si ia in consideratie eventualul efect al maselor neechilibrate ale celorlalte parti rotitoare aferente rotii (discuri de frana, tambure etc). Dezavantajele metodei, si anume, precizia scazuta si necesitatea unor operatori specializati, au facut sa prolifereze cu predilectie cel de-al doilea procedeu, al echilibrarii rotii demontate de pe automobil. Operatiunea nu depinde de locul dispunerii masinii si se bucura de o precizie superioara; dezavantajele sale constau in imposibilitatea echilibrarii celorlalte mase legate de roata; in plus, abaterile de centrare a prinderii rotii pe vehicul pot influenta comportamentul ei dinamic iar prin natura sa procedeul nu este compatibil cu diagnosticarea rapida.
Dupa regimul la care se efectueaza echilibrarea se deosebesc masini care functioneaza la rezonanta, masini care opereaza la un regim superior celui de rezonanta (numite si masini cu arbore elastic) si masini care functioneaza la o turatie inferioara celei de rezonanta (numite si masini cu arbore rigid).
5.2.2.2. Masini de echilibrat cu functionare la rezonanta
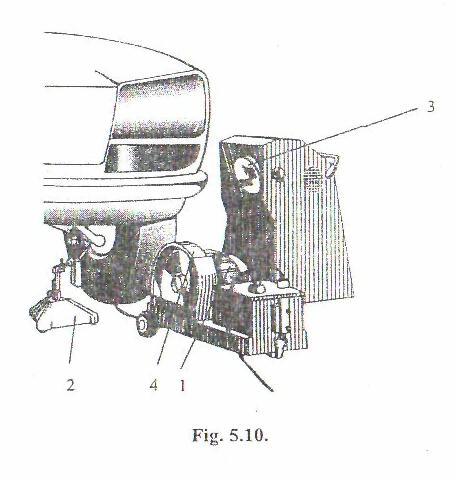
Aceste masini fac parte, de obicei, din categoria instalatiilor care efectueaza echilibrarea direct pe automobil. In principiu, in structura lor intra un motor electric 1 (fig. 5.10) pe al carui ax se afla instalat un tambur 4.
Roata automobilului se suspenda iar instalatia se aduce in pozitia in care tamburul intra in contact cu roata. Sub unul din elementele puntii, solidar cu roata cercetata, se plaseaza traductorul inductiv 2; acest element poate fi bratul pendular al suspensiei, traversa puntii, trompa semiarborilor etc.
Prin punerea in functiune a motorului electric, tamburul antreneaza roata iar perturbatiile oscilatorii ale acesteia transmise elementului puntii sunt sesizate de traductor si transformate in impulsuri de tensiune electrica, proportionale cu viteza de deplasare a centrului rotii. In acelasi timp, la fiecare oscilatie traductorul activeaza lampa stroboscopica 3. Instalatia mai dispune de un milivoltmetru pe care se citesc tensiunile furnizate de traductor.
Relatiile
(5.1) si (5.2) atesta ca intre functia excitatoare si deplasarea pe
verticala a rotii exista un defazaj ![]() a carui
de caracteristicile constructive ale suspensiei si ale rotii precum si de
viteza unghiulara a acesteia din urma. Daca roata este adusa la viteza
unghiulara de rezonanta proprie oscilatiei libere a ansamblului
roata-suspensie, atunci defazajul se deduce din relatia (5.3) in care se
inlocuieste:
a carui
de caracteristicile constructive ale suspensiei si ale rotii precum si de
viteza unghiulara a acesteia din urma. Daca roata este adusa la viteza
unghiulara de rezonanta proprie oscilatiei libere a ansamblului
roata-suspensie, atunci defazajul se deduce din relatia (5.3) in care se
inlocuieste:
![]() rezultand:
rezultand:
![]()
aceasta inseamna ca la regimul de rezonanta miscarea centrului rotii este defazata cu un sfert de rotatie in urma fata de rotatia masei neechilibrate.
Pe de alta parte, se stie ca un traductor inductiv ofera semnale proportionale cu viteza centrului rotii x a carei expresie se obtine prin derivarea relatiei (5.2):
Cum la
rezonanta marimea fortei perturbatoare este, conform relatiei ![]() (5.1) rezulta ca masa neechilibrata si viteza
centrului rotii sunt functii aflate in aceeasi faza si ca deci
semnalul electronic exprima chiar pozitionarea unghiulara a masei ne echilibrate.
(5.1) rezulta ca masa neechilibrata si viteza
centrului rotii sunt functii aflate in aceeasi faza si ca deci
semnalul electronic exprima chiar pozitionarea unghiulara a masei ne echilibrate.
Acest semnal, a carui variatie corespunde curbei l din figura 5.11, este derivat de aparat (curba 2), amplificat (curba 3), dupa care varfurile curbei sunt taiate, obtinandu-se variatia tensiunii u reprezentata de linia 4. Aceasta este derivata din nou, rezultand impulsurile 5; portiunile negative sunt anulate, iar cele pozitive se aplica lampii stroboscopice, care va ilumina roata, in situatiile in care masa neechilibrata ocupa cea mai joasa pozitie. .
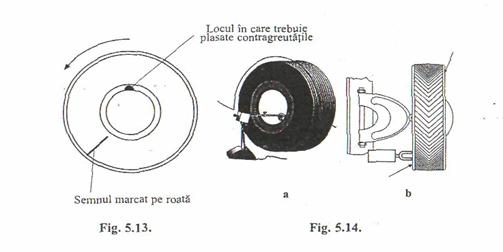
Pentru a se putea fixa locul in care trebuie sa fie plasata contragreutatea de echilibrare, inainte de inceperea lucrarii se face pe roata un semn cu creta sau se aplica o banda. Apoi, cu ajutorul motorului electric, se antreneaza roata pana la o turatie superioara celei de rezonanta si se indeparteaza tamburul desfacand astfel contactul dintre el si roata; aceasta va continua sa se invarteasca intr-o miscare incetinita, atingerea regimului de rezonanta fiind semnalata de realizarea celei


mai inalte valori a
tensiunii umax indicata de milivoltmetru, asa dupa cura
rezulta din figura
5.12, cand ![]() iar
iar![]() .
.
In aceasta situatie lampa stroboscopica va ilumina roata in pozitia in care masa neechilibrata se afla in partea de jos iar un observator va vedea roata in stare imobila cu semnul dispus intr-o pozitie oarecare (fig. 5.13). Se franeaza roata pana la oprire si se aseaza cu semnul in pozitia in care a fost remarcat in timpul incercarii, cand se facea iluminarea cu lampa stroboscopica. Acum masa neechilibrata se afla in partea de jos a rotii, deci locul in care trebuie plasata contragreutatea de echilibru este plasat diametral opus, adica in partea de sus a jantei, asa cum se arata in figura 5.13.
La rezonanta, viteza centrului rotii este proportionala cu masa neechilibrata dupa cum rezulta din relatia (5.5), deci aceasta este la randul ei proportionala cu indicatiile milivoltmetrului, a carui scala cuprinde si indicatii privind marimea acestei mase, exprimata in grame.
Din cele aratate se vede ca valorile determinate prin acest procedeu sunt influentate atat de masa suspendata a puntii, cat si de starea tehnica a suspensiei; de aceea indicatiile oferite de aparat nu sunt precise decat pentru un anumit tip de masina, pentru alte constructii precizia determinarilor depinzand de experienta personalului tehnic.
Pentru efectuarea echilibrarii dinamice, traductorul inductiv se aduce in apropierea discului fix al rotii si se plaseaza in pozitie orizontala, ca in figura 5.14, a.
Daca roata prezinta o dezechilibrare dinamica, cuplul creat de masa neechilibrata si cea aditionala va face ca in timpul antrenarii roata sa oscileze in jurul pivotului fuzetei. Procedeul de echilibrare dinamica este asemanator celui static. Roata este adusa la o viteza de rotatie superioara celei de rezonanta, apoi este lasata sa se invarteasca liber si, cu ajutorul milivoltmetrului se stabileste momentul atingerii regimului de rezonanta. In acest moment se retine pozitia pe care o ocupa marcajul de pe roata cand aceasta este iluminata cu lampa stroboscopica, dupa care roata se opreste si se aseaza in pozitia mentionata. Masa de echilibrare, a carei valoare este citita pe scala milivoltmetrului, se imparte in doua parti egale si se dispune asa cum se arata in figura 5.14, b, diametral opus, una in partea de jos in interiorul jantei si alta in partea de sus in exterior.
5.2.2.3. Masini de echilibrat cu arbore elastic
Aceasta categorie de masini de echilibrat functioneaza la pulsatii superioare celei proprii sistemului de prindere a rotii, adica mai ridicate decat cele de rezonanta, si opereaza prin demontarea rotii de pe autovehicul. De fapt, arborele masinii nu este elastic, asa cum in mod impropriu sunt denumite aceste instalatii, ci roata si arborele ei sunt suspendate elastic formand, impreuna cu arcurile, un sistem elastic care are o frecventa a pulsatiilor proprii relativ coborata si un grad de amortizare neglijabil. Masinile construite dupa acest principiu pot avea lagarul de oscilatie fix sau deplasabil.
O masina cu lagar de oscilatie fix comporta un arbore 1 (fig. 5.15) sprijinit in lagarul oscilant 3, care permite oscilatia arborelui doar in plan orizontal.
La o extremitate a arborelui se monteaza roata supusa echilibrarii iar la cealalta sunt ancorate arcurile 2. Deplasarile acestei extremitati sunt sesizate de un traductor care poate fi de natura electrica sau mecanica.
Roata, echilibrata static, se monteaza pe arbore astfel incat planul interior al jantei sa cuprinda centrul de oscilatie al arborelui 1. Din figura se vede ca o astfel de montare face ca oscilatiile arborelui sa nu fie provocate de masele neechilibrate 6 aflate in planul interior al jantei, ci numai de acelea existente in fata lui, 5.
invartind roata, se determina locul si marimea masei aditionale necesare echilibrarii, folosind in acest scop indicatiile dispozitivului de citire al traduclorului 4.
Masa aditionala se plaseaza in pozitia A (fig. 5.16, a), eliminand astfel efectul masei ne echilibrate 5.
Pentru acest sistem elastic sunt valabile relatiile generale (5.1) .(5.4), asa incat,
daca se reprezinta variatia defazajului folosind relatia (5.3), se va obtine
curba din figura 5.12.
Traductorul, care indica pozitia arborelui masinii de echilibrat, va preciza locul de plasare a
contragreutatii, decalat cu unghiul![]() , numai
daca
, numai
daca ![]()
Sub acest regim decalajul unghiular scade puternic, astfel incat precizia pozitionarii masei de echilibrare este compromisa.
In faza urmatoare, roata este lasata sa se invarteasca liber si foarte lent pana la oprire; in aceasta pozitie, pe partea superioara a jantei si in planul interior in pozitia (fig. 5.16, b), se plaseaza mase magnetice a caror marime se determina prin tatonare, pana cand roata ramane in echilibru indiferent, eliminand astfel si efectul masei neechilibrate 6.
Rezultatele mai bune se obtin cu instalatiile la care lagarul de oscilatie este deplasabil, putand fi adus in pozitiile 1 sau 2 (fig. 5.17). Echilibrarea se face tot in doua etape; pentru prima etapa, punctul de oscilatie se aduce pozitia 1 astfel incat arborele oscileaza ocupand pozitiile I-I, sub actiunea fortei centrifuge creata de masa neechilibrata A. Dupa echilibrarea acestei mase, punctul de oscilatie se deplaseaza in punctul 2 facand ca arborele sa oscileze luand pozitiile II-II, de data aceasta sub efectul fortei centrifuge creata de masa neechilibrata B.
Stabilirea pozitiilor in care trebuie sa fie plasate masele aditionale se poate face cu dispozitive mecanice, electrice sau optice, unul dintre acestea fiind prezentat in figura 5.18.
Traductorul inductiv 7 transmite periilor 1 semnalele electrice care ajung la aparatul de citire a tensiunii 2 prin reteaua 3. Aparatul indica valoarea medie a tensiunii livrata de traductor. Periile 1 sunt aplicate pe un colector formal din doua semiinele,
Stabilirea pozitiei unghiulare a periilor in raport cu arborele, deci cu roata ce trebuie sa fie echilibrata, se face cu ajutorul unor scale, una dispusa pe suportul periilor si alta pe arbore.
Pentru
determinarea locului de dispunere a maselor aditionale, trebuie sa se observe
ca, la aceste tipuri de masini, intre oscilatia masei neechilibrate si cea a centrului
rotii exista un defazaj ![]() (vezi fig. 5.12); deci intre semnalul 1 (fig.5.19)
emis de traductor (semnal care este proportional cu viteza de deplasare a
centrului rotii) si oscilatia masei neechilirate 2 exista un decalaj
(vezi fig. 5.12); deci intre semnalul 1 (fig.5.19)
emis de traductor (semnal care este proportional cu viteza de deplasare a
centrului rotii) si oscilatia masei neechilirate 2 exista un decalaj ![]() daca
pulsatia arborelui masinii este
daca
pulsatia arborelui masinii este ![]() ,
, ![]() fiind
pulsatia proprie a sistemului elastic.
fiind
pulsatia proprie a sistemului elastic.
Derivatia functiei l va reprezenta prin urmare chiar pozitia masei neechilibrate.
Daca se
presupune ca la inceputul operatiunii periile erau astfel dispuse incat culegeau
tensiunea in perioada A, valoarea tensiunii culeasa creste progresiv
pana la o valoare de varf, care se atinge cand tensiunea este culeasa in
perioada B, adica dupa ce suportul periilor a fost rotit ca unghiul![]() . Asadar,
rotind suportul periilor, tensiunea medie
variaza de la zero pana la o valoare maxima, aceasta din urma realizandu-se
pentru acea pozitie a periilor care coincide cu cea mai coborata pozitie a
masei neechilibrate (tinand seama ca arborele masinii oscileaza in plan
orizontal).
. Asadar,
rotind suportul periilor, tensiunea medie
variaza de la zero pana la o valoare maxima, aceasta din urma realizandu-se
pentru acea pozitie a periilor care coincide cu cea mai coborata pozitie a
masei neechilibrate (tinand seama ca arborele masinii oscileaza in plan
orizontal).
Prin urmare, pe scala aparatului de masura a tensiunii se va citi valoarea masei neechilibrate, iar scala colectorului va indica dispunerea unghiulara a ei.
Dupa aceasta, roata este oprita si apoi se invarteste usor, pana cand pe scala gradata a arborelui se stabileste acelasi unghi ca pe cea a colectorului; contragreutatea de echilibrare se va fixa in partea superioara a jantei, in planul exterior al acesteia.
5.2.2.4. Masini de echilibrat cu arbore rigid
Masinile de echilibrat cu arbore rigid functioneaza la regimuri subrezonante cu pulsatii cuprinse in intervalul:
La aceste viteze de oscilatie defazajul unghiular dintre pozitia centrului rotii si cea a masei neechilibrate este aproximativ nul, asa cum rezulta din figura 5.12. Prin urmare, pozitia centrului rotii reprezinta chiar pozitia masei neechilibrate, in antifaza cu care trebuie sa fie amplasata masa aditionala.
La astfel de
masini, a caror constructie este asemanatoare cele prezentate in figurile 5.15
si 5.17, arcurile de echilibrare sunt foarte puterice, asa incat pulsatia proprie a sistemului
elastic are valori mai mari decat cea cu care se lucreaza in timpul
operatiunilor de echilibrare ![]() , in
raportul aratat mai inainte, ceea ce face ca ansamblul sa fie practic rigid.
Deplasarile laterale ale arborelui fiind extrem de mici, fortele de inertie perpendiculare pe axa de
rotatie sunt neimportante si permit folosirea
fara dificultati de aplicare a unor dispozitive electrice pentru masurarea
acestor forte, care indica direct si precis valoarea masei neechilibrate.
, in
raportul aratat mai inainte, ceea ce face ca ansamblul sa fie practic rigid.
Deplasarile laterale ale arborelui fiind extrem de mici, fortele de inertie perpendiculare pe axa de
rotatie sunt neimportante si permit folosirea
fara dificultati de aplicare a unor dispozitive electrice pentru masurarea
acestor forte, care indica direct si precis valoarea masei neechilibrate.
Trebuie sa se retina ca astfel de masini ofera o precizie satisfacatoare numai daca pulsatia de lucru (deci turatia rotii) in timpul operatiunilor nu trece de nivelul aratat, adica nu depaseste limita dincolo de care defazajul si amplitudinile cresc rapid.
Pentru a inlatura efectul vibratiilor usoare (care se produc, totusi, in timpul incercarilor) si pentru ca rezultatele masurarii fortelor sa nu fie influentate de unii factori externi, masinile de acest fel sunt echipate cu circuite de filtrare si compensare care insa complica si scumpesc instalatia de 1,5 -2 ori in comparatie cu costul unei masini cu arbore suspendat elastic.
in consecinta, se poate aprecia ca toate masinile de echilibrat dau valori aproximative pentru marimea maselor aditionale si unghiul lor de amplasare; de aceea hotaratoare in ceea ce priveste atelierul de diagnosticare este nu precizia masinii, ci mai ales comoditatea tehnologica a determinarilor si simplitatea intretinerii instalatiei.
|
