Tehnologii moderne de transfer a documentelor traditionale in documente electronice
Capitolul I
Migratia documentelor traditionale in documente electronice
Migratia documentelor clasice in formatul electronic permite companiilor sa raspunda mai rapid la schimbarile produse in mediul de afaceri si sa fluidizeze fluxurile informationale si de documente.
Prin solutiile de management de documente se va reduce insa substantial numarul de documente 'traditionale' din cadrul firmei in favoarea fisierelor digitale. Avantajele procesului de migratie de la traditionala hartie la formatul digital sunt semnificative.
In primul rand, documentele in format digital pot circula mai rapid intre diverse departamente ale firmei, in plus existand si posibilitatea de a lucra in echipa la elaborarea unor documente cu un grad de complexitate mai ridicat. Toate aceste beneficii conduc la un plus de eficienta in derularea proceselor de afaceri. De asemenea, la nivelul administratiei publice si locale, prin solutiile informatice de management de documente se poate reduce semnificativ birocratia si ineficienta.
1.1 Legislatia - factorul principal pentru generalizarea documentelor in format electronic
Legislatia este un factor principal pentru generalizarea si adoptarea pe o scara cat mai larga a documentelor in format electronic. Daca in trecut existau limitari de ordin legislativ in adoptarea documentelor electronice, in ultimii ani s-au facut progrese importante in acest sens. Schimbarea este vizibila atat la nivel privat, cat si la nivel guvernamental. Sistemul Electronic National, accesibil pe Internet la adresa www.e-guvernare.ro, este un portal complex de servicii si informatii publice ale institutiilor administratiei centrale. Portalul ofera acces la un numar relativ mare de formulare electronice care simplifica interactiunea intre cetatean si institutiile guvernamentale.
In cadrul companiilor private se constata utilizarea pe scara tot mai larga a solutiilor de management de documente, acestea fiind in general combinate cu portaluri Web pentru colaborarea si partajarea via Internet a informatiilor si documentelor.
1.2 Specializarea solutiilor de document management
In ultimii ani se constata o tendinta de specializare a solutiilor de document management, existand un portofoliu mare de aplicatii adresate unor verticale profesionale sau unor domenii particulare. Astfel, sunt accesibile solutii dedicate primariilor sau altor institutii publice, precum si sisteme de management al documentelor destinate companiilor cu diverse profile. Sistemele specializate pentru managementul documentelor sunt in masura sa raspunda mai bine unor nevoi particulare ale organizatiilor, fiind compatibile si cu norme legislative caracteristice respectivelor domenii.
Documente inteligente
O alta tendinta pe care o remarcam in ultimii ani este legata de folosirea pe scara tot mai larga a tehnologiilor XML si a serviciilor Web pentru asigurarea interoperabilitatii si schimbului de date sau documente intre diverse aplicatii. Prin aceste tehnologii este oferit un 'limbaj' universal care asigura transferul datelor in mediile care prezinta un nivel de eterogenitate ridicat.
Printre proiectele importante realizate in Romania ce au la baza XML se numara si Transfond. 'Sistemul National de Plati' permite realizarea transferurilor financiare intre institutiile bancare folosind mijloace electronice, eliminand modalitatile de decontare bazate pe documente clasice.
Solutii de document management pe piata din Romania
Pe piata din Romania exista un numar mare de solutii dedicate managementului documentelor, acestea acoperind diverse nevoi ale institutiilor publice si companiilor. Alaturi de solutiile oferite de liderii industriei IT&C la nivel global, este accesibila si o paleta extrem de variata de aplicatii dezvoltate de companii software autohtone. In plus, prin disponibilitatea unui numar mare de echipamente hardware specializate pot fi integrate simplu solutii complete care acopera toate nevoile organizatiilor, incepand cu conversia in format digital si incheind cu solutii de stocare si management a documentelor digitale.
IBM ofera solutii performante dedicate managementului de documente, fiind disponibila si o platforma avansata destinata dezvoltarii unor aplicatii specializate. Microsoft dispune de tehnologii evoluate de dezvoltare a unor aplicatii specializate de management de documente, oferind totodata accesul la o serie de solutii specializate care simplifica procesele de colaborare si managementul de documente. Microsoft SharePoint Portal Server permite conectarea utilizatorilor si a echipelor din cadrul organizatiilor, oferind posibilitatea de comunicare si acces la informatii prin intermediul unui portal Web. Integrarea unui mediu colaborativ, avand la baza aceasta solutie, poate contribui la eficientizarea proceselor de business, determinand imbunatatirea modului de lucru in echipa si reducerea timpului necesar pentru luarea deciziilor. SharePoint Portal Server face parte din Microsoft Office System, in acest sens este de mentionat puternica integrare cu programele care compun acest sistem de aplicatii.
Astfel, in cadrul suitei Office 2003 sunt disponibile instrumente care simplifica lucrul in echipa si partajarea documentelor prin intermediul acestui portal.
Oracle ofera, la randul sau, platforme si tehnologii avansate de colaborare si document management la nivelul organizatiilor. Oracle Portal este o solutie performanta, care permite partajarea si schimbul eficient de documente folosind tehnologii Web. In plus, prin Oracle Application Server si alte solutii oferite de aceasta companie pot fi dezvoltate simplu sisteme informatice particulare pentru managementul documentelor.
HP dispune de o gama completa de solutii pentru managementul documentelor, permitand integrarea cu diverse categorii de aplicatii.
Adobe (distribuit in Romania prin IRIS) ofera tehnologii performante pentru managementul documentelor, ele fiind bazate pe formatul PDF.
Printre companiile ofertante de solutii pe piata din Romania se numara si Advanced Technology Systems - ATS, Eurocom, Genesys Software, INDACO, Keysoft, Konika Minolta, Matrix, MGT, Microsoft, Net Consulting, QCT Connect, S&T, Scop, Siveco, Sobis, SoftNet, Softwin, Star Storage, TotalSoft, UTI Grup, Xerox, XOR etc. CW
CAPITOLUL II
Echipamente utilizate pentru migratia documentelor
Scanner-e
2.1 Definitie
scanner) este un echipament periferic extern destinat introducerii rapide a informatiilor grafice si alfanumerice în calculator prin preluarea directa (scanare) de pe hârtie.
Scanner-ul poate converti orice imagine de pe hârtie - sau de pe o alta suprafata plana - într-o forma electronica acceptata de calculator . Punct cu punct, scannerul poate reproduce fotografii, desene formate din linii si chiar colaje cu detalii mai fine decât pot fi reproduse de imprimanta cu laser. Aproape toate scannerele impun deplasarea mecanica a senzorilor peste imagine, desi câteva scannere cu rezolutie mai mica folosesc tehnologii video. Pentru citirea imaginii într-un scanner mecanic, sunt folosite doua strategii. Prima dintre acestea cere ca senzorii sa se deplaseze peste imaginea originala; a doua deplaseaza imaginea originala prin fata unor senzori imobili. În cazul unui scanner video, nu se misca nimic, cu exceptia unui fascicol de electroni.
2.2 Tipurii de scanner-e
Scanner-e pot fi clasificare
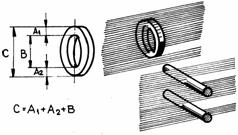
Manuale sau automate
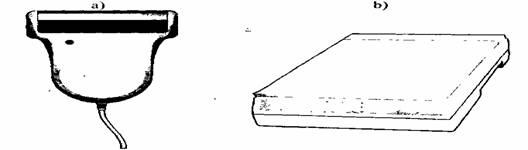
Fig. 1.Scanner-e manuale (a) si automate (b)
La scanare, cel manual este deplasat cu mâna pe suprafata colii cu informatie; în cel automat se aranjeaza coala, iar procesul scanarii însesi decurge automat.
Scannerele cu tambur sau (drum scanners) exemplifica ultima dintre tehnologiile amintite. Aceste scannere functioneaza invers fata de o imprimanta.Doua modele de scannere folosesc o strategie opusa, deplasând senzorii în locul imaginii.
|
|
|
Fig.2 Scanere cu tambur |
Scanner-ul cu pat (flatbed scanner,) foloseste un mecanism automat pentru deplasarea senzorilor. Numele lui provine de la suprafata plata de sticla pe care se aseaza materialul ce trebuie scanat. Senzorii de scanare sunt montati pe o bara care se deplaseaza pe sub sticla, parcurgând toata suprafata imaginii. Suprafata de sticla permite senzorilor sa "citeasca" imaginea.
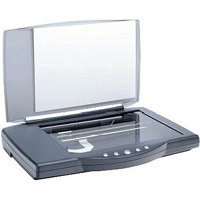
Fig.3 Scanner flatbed xerox 4800
Scanner-e de documente
Scannerele pentru documente sunt foarte compacte, ocupa foarte putin spatiu pe birou si pot scana atât foi întregi de hârtie cât si poze mai mici. Ele lucreaza ca un scanner de mâna mai lat, având încorporat un alimentator motorizat de hârtie. Foaia de scanat este introdusa printr-o fanta în scanner, iar motorul o deplaseaza cu viteza mica pe sub capul scannerului, abtinându-se astfel o imagine scanata perfect.

Fig.4 Scanner de documente
Canon Document Reader DR-5010C
Scanere plane (foto)
Acestea sunt scannere care arata ca un fotocopiator mai îngust. În acest caz, dumneavoastra trebuie sa ridicati capacul si sa asezati hârtia pe o suprafata de sticla. În loc sa deplasati poza, scannerul misca trenul de scanare pe sub foaie. Majoritatea scannerelor plane pot scana hârtie de dimensiuni pâna la A4. Calitatea scanarii este mai buna decât în cazul primelor doua tipuri.Când introduceti o poza într-un scanner sau când rulati un scanner deasupra ei va fi proiectata o lumina puternica. O fâsie subtire de imagine este culeasa de un detector sensibil la lumina care transforma zonele se lumini si umbre ale pozei în semnal electrice expediate apoi PC-ului.

Fig. 5 Scanner foto
Scannerele video reprezinta echivalentul electronic al unui copiator fotografic. Scannerul video foloseste o camera video obisnuita pentru capturarea imaginii. Majoritatea scannerelor video au camera montata pe un stativ, sub care se afla un suport pe care se plaseaza imaginea de scanat. Suportul poate fi iluminat din spate,
pentru a permite scanarea negativelor si filmelor transparente, sau poate fi o suprafata plata pentru foi de hârtie sau obiecte tridimensionale. Cel mai ieftin model este scannerul manual, deoarece nu contine mecanisme precise de scanare.
HP Scanjet 7800 Document Scanner

fig. 6 HP Scanjet 7800 Document Scanner
Descriere produs
Un nou produs pe piata a fost lansat in a doua jumatate a anului 2006 este HP Scanjet 7800 Document Scanner ce desvolata o rezolutie optica de 1200 dpi si adancime de 48-bit.
Este un produs ideal pentru firma daca doriti scanarea repetata a documentelor de care aveti nevoie , fiind usor de utilizat, cu el puteti realiza foarte rapid lucrarea ce trebuie efectuata ajutand la reducerea timpului de executie necesare, destinatia documentelor realizandu-se fara probleme..Scannerul 7800 scaneaza ambele partii ale pagini intrun singur mod,se poate utiliza la diferite marimi de documente, putand scana pana la 25 de pagini pe minut.Este un scanner care nu ocupa mult spatiu, si va lucra pentru dumneavostra in conditii foarte bune in fiecare zi.
Specificati tehnice
Tipul de scanner: Sheetfed
Rezolutie optica: 1200 dpi
Marimea maxima scanata: 8.5" x 14"
Adancimea pe bit: 48-bit Color, 8-bit Grayscale
Conectare: Hi-Speed USB la PC
Canon DR-9080C Sheetfed Scanner

Fig. 7 Scanner cu alimentare automata
Descriere produs
Canon DR-9080C este varful de gama in materie de scanner din seria DR.Este un produs puternic al inginerie care se poate in diverse cerinte de scanare pe care dorim sa le realizam, aplicatii cu volum mare. Noul DR-9080C color compus din 2 parti amplasate in unul singur pe birou are performante bune, scanand 90 de pagini/minut alb-negru sau gry si pana la 50 ppm in color.Cu un pret bun, performantele acestuia sunt din cele mai bune pentru afacerea dumneavostra, chiar daca nu il folositi la capacitatea lui maxima.Cu alte cuvinte, este un produs care merita cumparat, prin faptul ca veti salva mult din costurile altor produse mai slabe calitativ.
Specificati tehnice
Tip de scanner: Sheetfed
Capacitatea de manipulare a colilor: 500 colii alimentate automat
Rezolutie optica : 600 x 600 dpi Optical
Marimea maxima de scanare: 12" x 39.4"
Adancimea( bit depth): 95 ipm Duplex, 55 ppm Simplex
Viteza de scannare pe fond gri: 180 ipm Duplex, 90 ppm Simplex
Conectare: USB 2.0, SCSI-3 on PC
Microtek ScanMaker 9800XL Flatbed Scanner

Fig. 8 Scanner flatbed
Descriere produs
Cu o adancime (depth) de 48-bit si cu o rezolutie optica de 3200 x 1600-dpi scannerul ScanMaker 9800XL aduce performante majore in firma unde este utilizat, desene grafice si chiar la personalul medical.Acest scanner tip FLATBED ( pat plan ) are dimenesiunide 12" x 17" poate fi utilizat si ca un scanner pentru scanare A3.
Acest scanner mai include o caracteristica , densitate optica de 3.7 cu multiple probe pentru a reduce zgomotul produs in procesarea imaginilor, o interfata tripla cu FireWire, USB 1.1 si un SCSI 2 multilateral multiplu su un noi design-uri de sabloane pentru o acomodare larga .
Tip de scanner: FlatBed
Rezolutie: 3200 x 1600 dpi Optical
Marimea maxima de scanare: 12" x 17"
Adancimea ( bit depth): 48-bit Color, 16-bit Grayscale
Conectare: FireWire, SCSI 2, and USB 1.1
HP Scanjet N6010
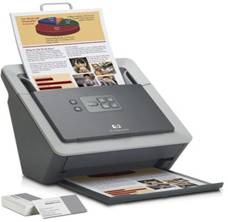
Fig.9 Scanner HP scanjet
Descriere produs Scanner HP Scanjet N6010
Rezolutie optica de scanare peste 600 dpi
Rezolutia hardware de scanare peste 600 x 600 dpi
Bit-depth 48-bit
Gray scale levels 256
Scala imagini sau marimea cu rand de la 10 la 2000% in 1 % increment
Viteza de scanare peste 18 ppm/ 36 ipm
Viteza de scanare ( A4) 18 ppm/ 36 ipm
Marimea maxima de scanare 215.9 x 355.6 mm
Scanarea fisierelor in formate: PDF, JPEG, TXT, UNICODE, RTF, HTM, DOC, WPD, XML, XLS, OPF, JPG, TIF, G3, G4
System de operare Windows® 2000, XP Home, XP Professional,
Interfata de conectare : Hi-Speed USB - compatibil cu specificatii USB 2.0
Porturi I/O Hi-Speed USB: compatibil cu specificatii USB 2.0
Dimensiuni (W x D x H) 320 x 270 x 312 mm
Canon DR-4010C Sheetfed Scanner
Fig.10 Scanner Canon DR-4010C
Descriere produs
Usureaza munca de la birou si creste productivitatea cu noul scanner Canon DR-4010C.
Acest puternic instrument utilizat in domeniu afacerilor se lauda cu dispozitive avansate pentru cresterea fluxului de lucru si a spori comoditatea executari cerintelor.
In adaos de rezolutie de 600 x 600 dpi optic, viteza de scanare de 42 ppm si capacitatea de 100 de colii, 4010C detecteaza automat dimensiunea paginilor, pozitionare si rotirea imaginilor si saltul peste paginile necompletate.Puteti folosi panoulul de control si un buton pentru atibuirea rutinele sarcinilor si realizarea proiectelor cat ai rapid.Programe incluse, cum ar fi Adobe Acrobat 7.0 Standard si CapturePerfect 3.0, ajuta la obtinerea unor performante maxime ale imaginilor digitale.
Specificati tehnice
Tip scanner Sheetfed
Rezolutie 600 x 600 dpi
Marirea maxima scanata 8.6-39"
Adancime scanare color 24-bit Color
Adancimea scanare 8-bit Grayscale
Bell & Howell Sidekick 1200 DuplexScan Sheetfed Scanner

Fig.11 Scanner Bell & Howell Sidekick 1200
Descriere produs
Bell & Howell Sidekick 1200 are ca caracteristicii compatibile color si bitonal ( consta in in prim planul si fundalul color). Viteza si calitatea imagini este ideala pentru un nivel de scanare.Un adaos desavarsit pentru un birou cu spatiu restrans , el putand intermedia diferite marimi ale documentelor de la 2" x 2.8" pana la 8.5 x 14".interfata de conectare este simpla, ea se face prin intermediul unui port USB 2.0 si interfat de 50 de pini SCSI III (compatibil de un port standard intre computer si perifericile acestuia), comanda do-it-yourself' ajuta la o usoara a scanari documentului , fiind un suport tehnic ce ajuta la scurtarea timpului de executie.Echipat cu noul program Capio al companiei Kofax , specializat in solutii de captare
documente profesionale , programul verifica automat si regrelaza aliniamentul, luminozitatea, contrastul si claritatea imagini. Programul Capio permite utilizatorului gestionarea rapida si usoara a fisierelor, recuperarea, e-mail si publica imagini color de o calitate superioara.
Tip scanner Sheetfed
Rezolutie 600 x 600 dpi
Adancime scanare color 24-bit
Adancime monocrom 8-bit
Interfata de conectare USB 2.0 cable, 50 Pin Dual Part SCSI III
2.3 Principiul de functionare al scanner-ului
Imaginile de scanat sunt plasate cu fata in jos pe sticla, lumina se aprinde, iar dispozitivul CCD (Charge-Coupled Devices - dispozitive care transforma un semnal luminos în semnal electric) si sursa de lumina se misca si "citeste" intreaga zona. Asadar, o imagine este vizibila dispozitivului CCD numai datorita luminii pe care o reflecta. Imaginile transparente nu functioneaza in acelasi mod si necesita accesorii speciale care le ilumineaza din partea superioara.
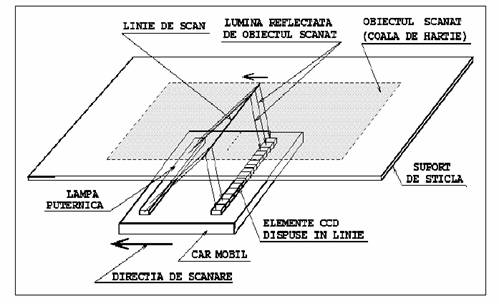
Fig.12 Schema de principiu a unui scanner
Imaginea ce se doreste scanata este parcursa de o linie de lumina generata de o lampa puternica - linia de scanare. Imaginea reflecta razele de lumina incidente spre o serie de dispozitive cuplate prin sarcina (CCD - Charge-Coupled Devices), dispuse in linie (paralela cu linia de scan).
Dispozitivele CCD au proprietatea de a acumula sarcina electrica direct proportionala cu cantitatea de lumina incidenta pe ele. Scannerele color functioneaza in principiu la fel, avand filtre pentru lumina rosie, albastra si verde. Scanarea se va executa intr-o singura trecere, sau in trei - cate una pentru fiecare culoare de baza.
Dintre parametrii importanti ai scannerelor amintim: rezolutia, dictata de distanta minima posibila din punct de vedere tehnologic dintre elementele CCD (in prezent, rezolutia limita are valoarea de 600 dpi - dots per inch, sau puncte pe tol), si _adancimea de culoare_, parametru dictat de sensibilitatea elementelor CCD.
Exista patru tipuri de tehnologii de scanare optica
2.3.1 Sistemul optic de scanare Mark Reading (OMR)
Acest sistem implica citirea unor date marcate in diferite locatii ale paginii. Software-ul computerului folosit de OMR este programat sa recunoasca utilitatea numeroaselor date si convertirea imaginilor scanate in date citite utilizand date marcate in diferite locatii ale pagini.
2.3.2 Sistemul optic de scanare cu recunoastere de caractere (OCR)
Textul citit de un scanner va fi stocat sub forma unor imagini de biti, fara utilitate pentru procesoarele de texte, care folosesc codul ASCII. Se poate transforma textul din forma grafica în coduri ASCII prin doua metode: prin dactilografierea fiecarui caracter sau prin recunoasterea optica a caracterelor (Optical Character Recognition -OCR). Primele programe OCR foloseau o tehnica numita corespondenta matriciala (matrix matching). Calculatorul compara mici portiuni din imaginea de biti cu modele stocate într-o biblioteca, în cautarea caracterului care semana cel mai mult cu modelul de biti scanat. De exemplu, litera "A" era recunoscuta ca un turn cu înaltimea de 40 de biti si cu o bara transversala de 20 de biti.
Majoritatea sistemelor OCR actuale se bazeaza pe corespondenta caracteristicilor (feature matching). Aceste sisteme nu se limiteaza la comparare, ci analizeaza fiecare model de biti scanat. Sistemele OCR, bazate pe corespondenta caracteristicilor, nu trebuie sa stie dinainte dimensiunea sau fontul caracterelor scanate. Programele OCR bazate pe corespondenta caracteristicilor pot prelucra rapid un text scanat, cu putine erori de recunoastere.
2.3.3 Sistemul de scanare cu recunoastere inteligenta a caracterelor (I.C.R.)
ICR preia de la sistemul OCR si face un pas inainte utilizand software-ul computerului in aplicatii inteligente de teste logice pentru a scana caractere mai complicate si convertirea lor in date citite de calculator .
Sistemul ICR aplica reguli gramaticale si cuvinte in vederea atasarii corecte a interpretarii in fisierele de date . Aceasta duce si mai mult la o acuratete a scanarii textelor si se realizeaza mult mai simplu ca si cum am scrie cu mana.
Tehnologia imaginara
In concluzie am capturat imagini si le-am transformat in date , dar scanerele pot de asemenea captura imagini care sunt stocate in computer ca imagini citite .
Fotografiile , desenele si imaginile cu text pot fi stocate si refolosite de computer ca forme de date citite .
Computerizand imaginile aplicatiile electorale isi extind aria . Imaginile pot fi folosite pe websites unde sunt printate in publicatii . Multe fotografii pot fi plasate de autoritatile electorale "Cine suntem noi" pe o pagina de internet sub forma unui "Raport Anual".
Ne putem imagina ca putem folosi tehnologia avansata pentru realizarea anumitor scopuri . Fotografia poate fi digitalizata si aplicata pe o carte de identitate . Amprentele degetelor sau trasaturile fetei de asemenea pot fi digitalizate si stocate pe carduri de memorie . Sistemele software de identificare pot fi folosite pentru a face o comparatie intre imaginea persoanei de pe un card de memorie si persoana inscrisa pentru a se determina daca este una si aceeasi persoana. O problema fundamentala a scanerelor este necesitatea de a realiza în general scanarea în linie dreapta, nu în arc de cerc. Aceasta problema se rezolva obisnuit prin utilizarea unor sisteme optice refractante cu 2 7 sau chiar mai multe lentile, cu un numar posibil egal de indici de refractie diferiti, cu 4 14 suprafete, cu 3 8 sau mai multe spatii între lentile, fiecare dintre aceste aspecte constituind "gradele de libertate" oferite proiectantului sistemului optic.
Capitolul III
3.1 Introducere in procesul de scanare
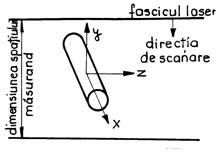
A scana (to scan, în limba engleza) înseamna a parcurge, a baleia. Este ceea ce ochiul uman face continuu, scanând atât spatial: o linie, o suprafata, un volum, cât si / sau temporal, prin înregistrarea "cadrelor" succesive ale realitatii înconjuratoare.
În general, în tehnica actuala, termenul de scanare defineste doar parcurgerea spatiala (mai rar temporala) a unui anumit mediu, de lucru sau investigat. Pe baza considerentelor de mai sus însa, se propune o extindere - fireasca, de altfel - a acestui concept, definind scanarea ca procesul parcurgerii succesive spatiale sau temporale a unui mediu, urmarindu-se unul sau mai multi dintre parametrii caracteristici ai acestuia, cu sau fara modificarea calitatilor intrinseci ai mediului reprezentate prin acesti parametrii.
Clasificarea procesului de scanare considerat în acest sens, generalizat, se poate realiza dupa mai multe criterii:
A. Dupa parametrul continutului spatio-temporal implicat:
Scanarea spatiala: se realizeaza prin parcurgerea succesiva a regiunilor diferite ale unui anumit mediu;
Scanarea temporala: se urmareste evolutia în timp (cu un increment temporal adecvat frecventei variabilitatilor fenomenologice implicate) a unei anumite regiuni a mediului investigat.
B.Dupa numarul parametrilor monitorizati:
Scanarea uni-parametrica (exemplu: determinarea lungimilor în masuratori dimensionale);
Scanarea multi-parametrica (exemplu: scanarea din satelit, cu investigarea pe un spectru larg, actualmente pâna la 64 lungimi de unda diferite, în aparatura spectrala cea mai performanta existenta).
C. Dupa tipul parametrului studiat (rpocesul de scanare fiind astfel în corespondenta cu un anumit simt):
Scanarea optica ↔ simtul vazului;
Scanarea în spectrul auditiv ↔ simtul auzului;
Scanarea mecanica ↔ simtul tactil;
Scanarea organoleptica (temporala) - vezi de exemplu investigarea spectrala a cineticii reactiilor chimice (cu increment temporal) ↔ simtul mirosului sau / si al gustului;
Scanarea termica
Scanarea magnetica s.a.
D. Dupa gradul de interventie în mediul considerat:
Scanarea pasiva: doar de investigare a mediului (pentru masurare, citire, etc.);
Scanarea activa: realizata în scopul modificarii în sensul dorit a unei / unor proprietati a / ale mediului de lucru, eventual dupa investigarea în prealabil a acestuia.
3.2 Clasificarea dispozitivelor de scanare (DS) laser
A. Dupa numarul de dimensiuni ale obiectului scanat:
DS uni-dimensionale (1D);
DS bi-dimensionale (2D);
DS tri-dimensionale D);
B. Dupa precizie: DS de precizie: mica; medie; înalta, cu observatia ca din acest punct de vedere încadrarea într-o anumita clasa se face în mod diferit pentru fiecare categorie de aplicatii.
C. Dupa viteza (v) de scanare:
DS lente (v de ordinul cm/s);
DS cu viteze medii (exemplu: DS pentru masuratori industriale);
DS rapide (exemplu: imprimantele laser).
D. Dupa tipul capului de scanare, exista DS cu element:
- în miscare de translatie;
- în miscare de rotatie: - cu oglinda plana;
- cu oglinda poligonala;
(varianta originala dezvoltata)
- în miscare de oscilatie (DS de tip galvanometric);
- rezonant;
- prin refractia razei;
- acusto-optic.
3.3.1. Clasificare
Scanerele sunt clasificate pe plan international într-o viziune extrem de pragmatica, oarecum simplificatoare fata de cea prezentata anterior în clasificarea dispozitivelor de scanare (DS). Exista astfel o divizare neta realizata exclusiv pe criteriul clasei de aplicatii în care este utilizat scanerul:
Scanarea la distanta ("Remote sensing") constituie prima clasa de aplicatii în cadrul careia au fost initial aplicate, în ordine cronologica, scanerele. Caracteristic este faptul ca scanarea este în general pasiva, de tip colectare de date; radiatia utilizata este incoerenta si, în general, multispectrala.
Aplicatiile reprezentative, grupate pe domenii, sunt:
a) medicale: cancer; artrita;
b) industriale: managementul energetic; defectoscopia termica; defectoscopia circuitelor electronice; testarea nedestructiva;
c) stiintifice: studiul resurselor terestre; meteorologie; astronomie;
d) de interes national: incendii forestiere (monitorizarea aparitiei lor); aplicatii în politie; criminalistica; operatiuni de salvare;
e) militare: dispozitive de ochire; vedere pe timp de noapte (tactica, de navigatie, rachete); operatiuni strategice (tip investigarea unor obiective din avion sau din satelit); operatiuni de supraveghere.
Scanere "input" si "output"/ "pasive" si "active"
Sunt caracterizate, prin contrast cu scanerele de la distanta, care capteaza pasiv radiatia primita de la obiect, de iluminarea obiectului sau a mediului investigat cu un spot în deplasare rapida, provenind de la un fascicul laser puternic colimat.
Aplicatiile reprezentative sunt urmatoarele:
a) Scanerele pasive / "input", care nu modifica proprietatile mediului scanat (înregistreaza radiatia laser împrastiata pe un obiect tinta): scanarea imaginilor / digitizarea; scanarea codurilor de bare; inspectia optica; recunoasterea optica a caracterelor; citirea memoriilor optice; arta grafica (citire); microscopia prin scanare; separarea culorilor; vederea artificiala (în robotica); radarul laser; masuratorile laser.
b) Scanerele active / "output" modifica local proprietatile mediului scanat (radiatia are un rol activ, de modificare a proprietatilor locale ale obiectului sau mediului-tinta): înregistrarea imaginilor / imprimantele; reproducerea culorilor imaginilor; scanerele din domeniul medical; markerele si gravarea prin scanare; recunoasterea înregistrarilor; realizarea memoriilor optice; fotolitografierea; arta grafica (realizare); înregistrarea datelor resurselor terestre; afisarea datelor sau / si a imaginilor.
3.3.1.1 Scanarea la distanta
Configuratii ale dispozitivelor de scanare la distanta:
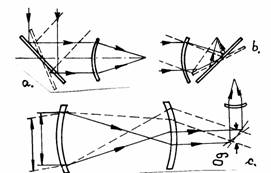
1. Configuratiile primare ale acestor scanare (Fig.13) erau realizate sub forma unor oglinzi simple (a) sau duble (b) pozitionate la 45 fata de axa de rotatie.
Gradul de acoperire (proportia în care timpul
disponibil este efectiv utilizat în procesul de scanare) este relativ
scazut, odata ce se realizeaza doar o scanare / rotatie
(varianta a), respectiv doua (varianta b). Problema principala
si dezavantajul solutiei îl constituie variatia deschiderii (aperturii) fascicolului functie de
unghiul de rotatie curent. O solutie care a eliminat acest dezavantaj
(introdusa de Kennedy înca din anii `60 într-o constructie
compacta, ce a impus-o ca lider necontestat timp de un sfert de secol)
este redata în figura 14. Principiul de functionare consta în
divizarea fascicolului initial în doua, astfel încât suma celor
doua portiuni sa fie
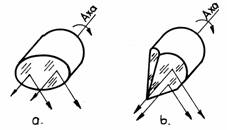
Fig.13 Scanere cu oglinda plana: a) oblica; b) dubla
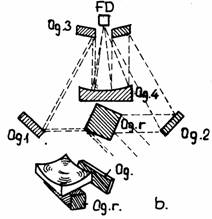
Fig.14 Scaner cu patru fete pentru elementul în miscare de rotatie
2. Scanerul cu prisme pana circulare rotitoare (Fig.15): printr-o constructie simpla se pot realiza traiecte extrem de variate de scanare (Fig.1.4). S-au notat: m = raportul frecventelor de rotatie ale celor doua prisme (m < 0 sensuri diferite de rotatie a prismelor); k = raportul unghiurilor prismelor; F = defazajul initial (la t = 0).

Fig.15 Scaner cu prisme pana rotitoare (configuratia de baza)
3. Scanarea circulara (Fig.16): întregul sistemul optic se roteste în jurul nadirului cu axa optica înclinata cu un unghi Y. Avantajul acestui sistem este ca, la o altitudine data, aria suprafetei scanate este identica de-a lungul întregii circumferinte.
4. Scanarea cu linie de FD (fotodetectoare): sistemul de scanare consta dintr-o linie de FD dispuse dupa directia de scanare (perpendicular dupa directia de zbor). Fiecare FD este citit pe rând si este ca si cum spatiul scanat ar fi parcurs de fascicul. Adesea, linia de FD este înclinata usor, astfel încât intervalul de timp dintre utilizarea a doua FD succesive sa dea o imagine care este exact perpendiculara pe directia de zbor. Avantajul evident al acestei solutii este faptul ca, în afara de platforma avionului sau a satelitului, din care se face scanarea, nu mai exista piese în miscare.
5. Scanerele bidimensionale (2D): sunt cele mai utilizate pentru studiul în infrarosu, în timp ce scanerele unidimensionale (1D) se utilizeaza predominant în investigatiile resurselor Terrei.
Exista trei configuratii principale de scanere 2D:
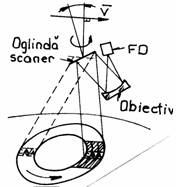
a) scanare cu oglinda pozitionata in spatiu direct
O varianta este ilustrata în figura 17a, unde o oglinda plana capteaza fascicolul obiect, dirijându-l spre obiectiv. Dezavantaje: necesitatea unei aperturi mari a oglinzii (pentru a putea cuprinde spatiul obiect), respectiv dificultatea pozitionarii precise a unei oglinzi de mari dimensiuni.
b) scanere cu oglinda în spatiul imagine: oglinda mobila este pozitionata într-un fascicol convergent, asadar are gabaritul mai mic; în schimb va forma, tot din cauza aceasta, o imagine curba daca miscarea sa nu va fi corectata (Fig 17b);
c) scanere cu fascicole paralele (cu oglinda între subansamblurile optice): prin alegerea corespunzatoare a unui sistem telescopic anterior oglinzii, gabaritul acesteia se poate micsora corespunzator (Fig 1.6c)
Exista variante constructive in cazul scanerelor cu fascicule paralele:
A. Solutia (b) a dat nastere unei variante viabile de dispozitiv de scanare 2D (Fig.18), în care scanerul Sc.1 parcurge încet spatiul scanat pe verticala, în timp ce Sc.2 asigura liniile de baleiere rapida, orizontale. Dispozitivul realizeaza concomitent preluarea semnalului de la spatiul scanat si realizarea unei imagini - "raster" (sablon de baleiaj). Un dezavantaj al acestei variante îl constituie gabaritul mare al oglinzii Sc.1 necesar pentru a realiza ambele miscari.
B. Varianta cu Sc.2 (care asigura scanarea verticala) de tip oscilant elimina dezavantajul solutiei anterioare, utilizând de aceasta data un element (oglinda oscilanta) cu gabarit redus (Fig 1.8).
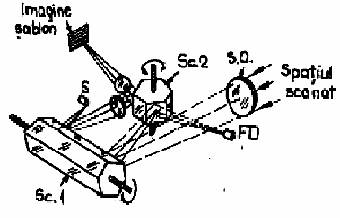
Fig.18 Scaner 2D cu oglinzi poligonale
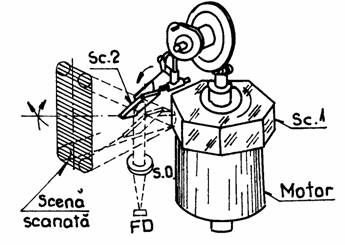
Fig.19 Scaner 2D de constructie compacta
6. Scanerele cu elemente refractive
prismatice (Fig. 20): printr-o alegere corespunzatoare a coeficientului de refractie si a geometriei prismei, se poate realiza o focalizare buna pe FD la o deschidere a câmpului obiect cât mai mare.
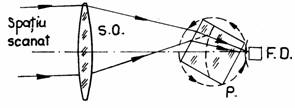
Fig.20 Scaner cu prisma de refractie
lenticulare (Fig.21): se utilizeaza lentile cilindrice - sisteme anamorfotice -, astfel ca se realizeaza doua scanari ale spatiului obiect pe rotatie (în figura sistemul lenticular este reprezentat în doua pozitii decalate cu 90 una fata de cealalta).
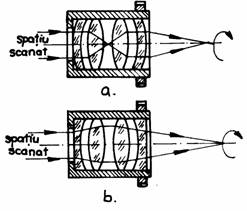
Fig. 22 Scaner refractiv lenticular
7. Sistem în IR cu
scaner galvanometric (Fig. 23): prin telescopul S.O.1 si scanerul
galvanometric (oscilant) Sc., radiatia IR este reflectata pe
reteaua de fotodetectoare FD. De aici, radiatia modulata este
transmisa prin obiectivul (
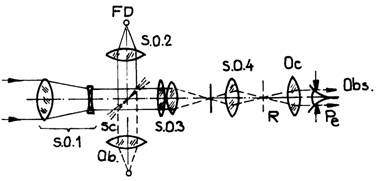
Fig. 23 Scaner în IR de tip galvanometric
8. Scanerele cu fascicule paralele pot fi (Fig. 24):
- cu oglinda poligonala rapid rotitoare (Sc.2) si scaner oscilant (Sc.1);
- cu scaner oscilant si disc cu oglinzi în miscare de rotatie (Fig. 25).

Fig. 24 Scaner cu fascicole paralele (2D) cu o oglinda poligonala si una galvanometrica
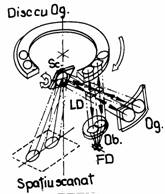
Fig. 25 Scaner cu fascicol paralel (2D) cu disc cu oglinzi
3.3.1.2 Scanere "input" si "output" (pasive si active)
În figura 26 sunt prezentate câteva variante de scanere de acest tip - care palpeaza obiectul sau spatiul parcurs de la mica distanta:
a) scaner obiectiv, cu obiectivul si fascicolul laser în miscare relativa fata de mediul de stocare a informatiei (mediul scanat);
b) scaner preobiectiv cu oglinda poligonala: fiecare fateta a oglinzii asigura o scanare cu o anumita amplitudine unghiulara. Fasciculul emergent din obiectiv, focalizat, parcurge un segment de dreapta;
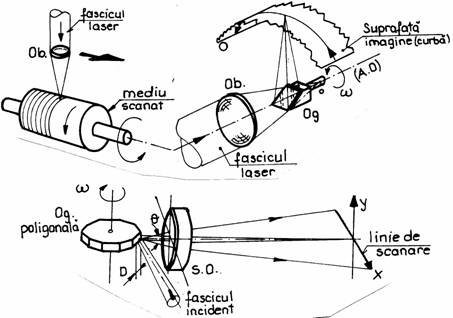
Fig. 26 Scaner input / output: a) obiectiv; b) preobiectiv; c) cu oglinda monogon
c) scaner cu oglinda monogon rotitoare. În acest caz, punctul de focalizare a fascicolului are traiectoria dupa un arc de cerc. Solutia are avantajul de a putea utiliza un obiectiv foarte simplu (unilenticular), procesul rezultând teoretic lipsit de aberatii.
În figura 27 este reprezentat un asemenea S.O., însa telecentric, de înalta performanta, cu 6 elemente, care transforma deplasarea unghiulara a fascicolului incident într-o deplasare liniara a spotului laser focalizat. Se observa principalul dezavantaj al solutiei: necesitatea ca S.O. sa aiba în planul de scanare o dimensiune mai mare chiar decât câmpul scanat, ceea ce ridica probleme de proiectare si executie. Avantajul variantei este focalizarea stricta a spotului în planul imagine si posibilitatea obtinerii autoreflexiei de pe proba scanata pentru calibrarea interna a dispozitivului.
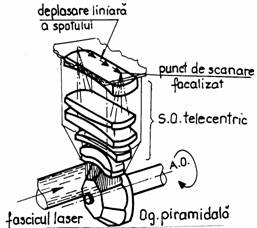
Fig. 27 Scaner piramidal cu S.O. telecentric (scanare în linie)
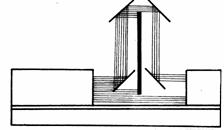
Scanarea "cu dubla trecere" este o alta functie posibila a sistemului lenticular. În fig.28 fascicolul laser, subtire, este expandat si dirijat de oglinda fixa (Og.) pe oglinda poligonala rotitoare, cuprinzând doua fatete ale acesteia. În acest fel, parcurgerea liniei de scanare se face cu spot dublu. În acest caz fascicolul incident si convergent trebuie fiecare usor decalat fata de planul de simetrie al S.O., pentru a se evita obstructionarea fascicolului emergent de catre oglinda fixa (Og.) în dispunerea sa initiala. Dezavantajul se elimina prin utilizarea unor alte solutii, cu utilizarea unei oglinzi dispuse lateral fata de traiectul razelor de scanare.
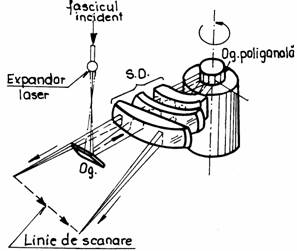
Fig. 28. Oglinda poligonala în scaner cu "dubla trecere"
3.3.2 Tipuri de dispozitive de scanare
Principalele tipuri de dispozitive de scanare, considerate de aceasta data nu dupa criteriul aplicativ, ci dupa cel al principiului de functionare, sunt:
a) scanerele poligonale: în varianta poligonala, ca poligon regulat cu "n" laturi (în particular, n=1 si se obtine varianta monogon) - figura 28, sau în varianta piramidala. Analiza si sinteza acestor dispozitive (calculul de proiectare) este o problema care va fi tratata în detaliu, într-o dezvoltare matematica originala, în Capitolul 3.
b) scanerele holografice: majoritatea acestora sunt realizate dintr-un corp rotitor dotat cu o retea de elemente holografice dispuse ca si fatete, analog unui scaner cu oglinda poligonala sau dispuse axial - simetric, analog unui scaner piramidal. Legile de scanare sunt similare cu cele ale scanerelor piramidale sau de tip poligonal rotativ, dupa solutia constructiva aleasa.
c) scanerele galvanometrice fac parte din clasa scanerelor oscilante si vor fi tratate în detaliu, cu varianta originala propusa, în Capitolul 4.
d) scanerele acusto-optice
e) scanerele electro-optice (scanerele "gradient")
mm teoretic, dar practic de 500 mm. S-au realizat însa microscoape (tipul Aurora, introdus de firma Topo Matrix Corporation), care "doboara" aceste limite prin scanarea probei cu o fibra optica având diametrul de 30 mm. Prin integrarea imaginilor obtinute într-o imagine de ansamblu rezulta o limita de rezolutie a aparatului mai mica de 50 nm, prin faptul ca lumina emisa prin fibra optica ramâne colimata aproximativ 15 nm. Asadar, mentinând proba în vecinatatea fibrei limita de rezolutie teoretica nu mai este data de fenomenul de difractie, ci de marimea aperturii.
Ca procedeu tehnologic care conditioneaza obtinerea dezideratului propus, fibrele optice utilizate au la capat o portiune pe care se face o depunere de aluminiu în vid pe tot diametrul, lasându-se "descoperita" doar în vârful fibrei, o portiune cu F30 nm.
Un sistem optic cu diametrul mare (obisnuit) preia
informatia optica de la fibra, traducând-o în variatie de
intensitatea luminoasa printr-un sistem de fotodetectori.
Printr-un sistem de control cu feed-back, se mentine capul
fibrei la distanta
c. Investigarea probelor biologice: aparatul consacrat poarta numele de Bioscope Scaning Probe Microscope si utilizeaza un sistem dual: contine un microscop optic cu ajutorul caruia se selecteaza zona de maxim interes din proba si un monoscop amicroscopic (bazat pe fortele de interactiune atomice), cu ajutorul caruia se depaseste bariera de difractie a luminii care limiteaza rezolutia microscoapelor optice. Aparatul dispune de toate tehnicile conventionale de microscopie, precum si de cele ale tehnologiilor de scanare a probei cu înalta rezolutie.
Ca domenii de aplicatie, trebuie amintite urmatoarele: realizarea de observatii biologice la nivelul moleculelor, la suprafata si în structura celulelor, a virusilor, precum si în structura ADN-ului. Se preconizeaza ca, în perspectiva, acest tip de procedeu va juca un rol esential in realizarea hartii genetice umane.
Exemplu: Microscop prin scanare (Fluoview, Olympus)
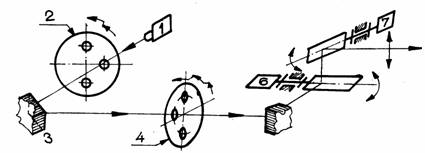
Fig. 29 Schema optica (simplificata) a capului de scanare modular
S-au notat: 1 - Sursa laser; 2 - Disc cu filtre neutre; 3,5 - Oglinzi; 4 - Diafragme "vârf-de-ac"; 6,7 - Scanere de tip galvanometric; 8 - Obiectiv.
Principiul de functionare: Raza laser, produsa de 1, modulata ca intensitate si diametru respectiv prin filtrele 2 si diafragmele 4, este deflectata de cele doua scanere, 6 si 7, pozitionate cu axele oglinzilor perpendiculare, în pupila de intrare a obiectivului 8. Astfel, dupa iesirea fascicolului din 8 este scanata, punct cu punct (obiectivul asigura focalizarea), suprafata probei care se doreste a fi investigata. Suprafata probei gasindu-se în planul xOy, scanarea dupa axa Oz este posibila prin focalizarea obiectivului 8 cu un micromotor de actionare. Variantele moderne ale unui asemenea microscop obtin astfel dupa axa Ox rezolutii de 0,1 mm pe o profunzime maxima de 1mm.
Modurile de scanare sunt multiple: se pot obtine imagini 2D (xy,xz), 3D (xyz) sau chiar 4D (xyzt), adica evolutia reliefului probei în timp; se pot face scanari rapide, de tip linie, 1D (xt sau yt).
3.5 Stereolitografia 3D (S.L.A.)
Modelarea laser 3D/tiparirea tridimensionala (S.L.A.) este o metoda de modelare fara hârtie, care permite evitarea unor pasi costisitori în convertirea unui proiect CAD într-un model real, tridimensional.
Principiul metodei consta în utilizarea unei raze laser care baleiaza un fotopolimer. Tehnologia foloseste proprietatea acestuia de topire si solidificare la expunerea rapida cu o raza laser ultravioleta, evident, precis pozitionata.
Modul în care sistemele 3D stereolitografice (S.L.A.) folosesc date CAD pentru realizarea unui model complex 3D prin "sectionare" orizontala cu un fascicul laser a unei probe de plastic lichid este prezentata în figura. Astfel, în punctul în care raza atinge lichidul, rasina fotopolimerica este expusa si are loc solidificarea, prin treceri succesive, a modelului, constituit din straturi de grosime de pâna la 0,004 inch; timpul de realizare este de câteva ore.
Istoric:
Trebuie amintit faptul ca prima realizare notabila de acest gen
apartine anilor 1939, când firma 3D Systems a folosit un sistem
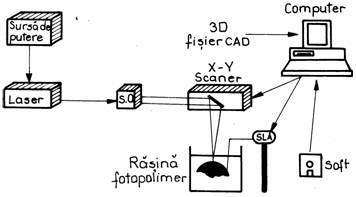
Fig.30. Modelarea laser 3D (S.L.A.)
Factorii cheie ai procedeului: partile de hard (laser + dispozitiv de scanare) si soft diferite de cele utilizate în mod conventional; folosirea unei noi familii de fotopolimeri.
Avantajele metodei sunt evidente:
economia de timp, efort si bani;
economia de material: modelul rezultat, desi are o suprafata completa si potrivita finisarii, are o structura interna cavernoasa, ceea ce micsoreaza tensiunile interne si faciliteaza drenajul lichidului nesolidificat;
micsorarea riscului dilatarii periculoase a materialului turnat asupra miezului ceramic; în cazul miezului din fotopolimeri, când forma este structurata în jurul sau si acesta este "ars", materialul polimeric se prabuseste efectiv în interior.
realizarea unor piese turnate cu rugozitatea suprafetei mai mica de 80 mm în stare nelustruita si sub 20 mm dupa lustruire;
detectarea precisa a erorilor de proiectare "ascunse" în forma CAD a proiectului si evaluarea corecta a esteticii produsului finit, înaintea începerii productiei finale.
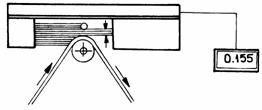
Masuratori prin scanare
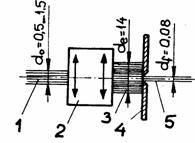
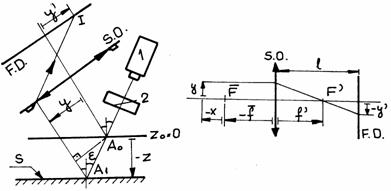
Schema de principiu a unui aparat de masurare a marimilor geometrice prin scanare cu raza laser este prezentata în figura 2.6. Elementele componente principale sunt: tubul laser (1), doua sisteme optice de focalizare de tip colimator (2), un fotodetector (3) si, ca element esential, capul de scanare (4), aflat în miscare de rotatie sau de oscilatie.
Principiul de functionare: Capul de scanare, constituit de exemplu dintr-o oglinda plana în miscare de rotatie, transforma raza laser fixa într-o raza rotitoare. Primul sistem optic trebuie sa asigure în permanenta o raza emergenta paralela cu axa optica. Raza laser va parcurge asadar spatiul masurand (5) dupa o directie perpendiculara pe axa optica.
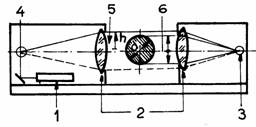
Fig.31 Aparat pentru masuratori dimensionale prin scanare laser
("Micrometrul optic")
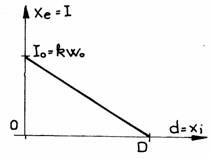
Exista doua variante posibile de prelevare a informatiei utile. Astfel, dimensiunea "d" a masurandului dupa directia de scanare (perpendiculara pe A.O.) poate fi data de:
a) marimea intervalului de timp Dt în care raza laser este obturata de masurand, asadar în care fotodetectorul (3) nu primeste semnal optic.
În acest caz, se pot întâlni doua situatii distincte:
- pentru o functie de scanare h(t) liniara (cazul cel mai favorabil, dar pentru atingerea caruia calculul de proiectare trebuie sa asigure solutii adecvate):
d = v Dt
unde v =ct. constituie viteza de scanare a spatiului luminos în spatiul masurand.
- pentru o functie de scanare h(t) neliniara (cazul general), "d" va fi o functie de doua variabile (Capitolul 3):
d(t0, Dt) = h (t0 + Dt) - h (t0)
unde t0 reprezinta intervalul de timp de la începerea unei scanari a spatiului masurand pâna la atingerea de catre raza laser a primei muchii a masurandului.
|
Fig.32 Caracteristica de functionare a micrometrului optic cu masurarea fluxului energetic |
b) energia radianta totala receptata de fotodioda la o scanare, obtinuta prin integrarea fluxului energetic incident:
unde: W0=energia care ar ajunge la fotoreceptor în absenta masurandului; D=diametrul util al sistemelor optice S.O.1, 2 în plan meridian=domeniul de masurare.
Notând cu k sensibilitatea modulului electronic, rezulta ca marime de iesire intensitatea curentului dat de FD (dupa redresare si amplificare):
![]()
- caracteristica de functionare de tipul celei din figura 32.
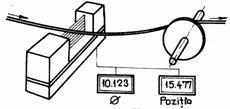
3.6 Sistemul de scanare. Caracteristici si utilizare
În continuare se va opta pentru varianta "a" din discutia anterioara, în figura 33 fiind prezentat ansamblul aparatului, cu indicarea dimensiunilor de gabarit caracteristice masuratorilor industriale. Se observa ca dispozitivul de scanare este de tip potcoava rotitoare în jurul masurandului, astfel ca pe display-ul monitorului se poate obtine forma completa a sectiunii masurandului, desigur cu o anumita precizie, rotirea facându-se cu un anumit increment unghiular.
Performantele sistemelor de scanare Bruno&Richter Tab. 2.1
|
Varianta Caracteristica |
|
|
|
|
|
|
|
F util [mm] |
|
|
|
|
|
|
|
Domeniu F[mm] |
|
|
|
|
|
|
|
Rezolutie [mm] |
|
|
|
|
|
|
|
Precizie [mm] |
|
|
|
|
|
|
|
Frecventa de scanare |
120/s |
120/s |
120/s |
120/s |
120/s |
120/s |
|
Viteza liniara de scanare |
150 m/s |
300 m/s |
220 m/s |
300 m/s |
560 m/s |
930 m/s |
|
Viteza unghiulara |
oscilatie continua |
/s |
/s 12 rot / min |
/s 12 rot/min |
||
|
Unghiul de rotatie |
oscilatie continua |
|
|
|
||
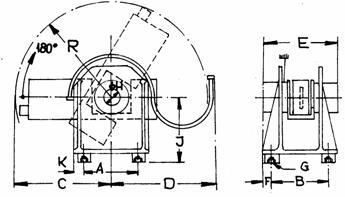
Fig. 33 Ansamblul aparatului. Dimensiuni de gabarit
Observatii: domeniul util de masurare nu poate depasi 75% din diametrul sistemelor optice utilizate; precizia de masurare poate fi marita prin calibrare pâna la 0,1% din dimensiunea de masurat; se pot realiza si sisteme de masurare duble sau multiple (pe doua sau mai multe axe) - vezi tabelul 2.
Performantele sistemelor de scanare dezvoltate de catre firma Bruno & Richter, reprezentative pentru domeniul masuratorilor industriale, sunt prezentate în tabelul 1. Dintre aplicatiile posibile ale acestui sistem de scanare, o parte sunt prezentate în tabelul 2.
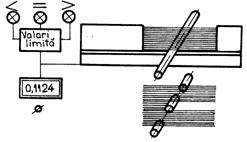
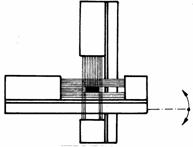
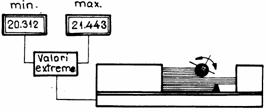
Masuratori dimensionale prin scanare. Aplicatii Tab. 2.2
|
a) Masurarea în regim continuu a firelor, cablurilor, tuburilor s.a. |
|
|
b) Masurarea profilului diverselor piese utilizând capete de masurare rotitoare; s.a.m.d. |
|
|
c) Masurarea profilelor rectangulare cu doua capete de masurare montate într-un dispozitiv rotitor (latime + grosime). |
|
|
d) Masurarea excentricitati, liniaritatii, concentricitatii, indicarea valorilor minime si maxime. |
|
|
e) Masurarea simultana a diametrului interior, exterior si a grosimii pieselor inelare; Masurarea distantei între doua piese. |
|
|
f) Masurarea grosimii benzilor utilizând cilindrii de rotatie si repere fixe de referinta. |
|
|
g) Masurarea diametrului si a sagetii, de exemplu pentru controlul întinderii curelelor de transmisie. |
|
|
j) Divizarea optica a capului de scanare, marindu-se câmpul de masurare; Masurarea în zone greu accesibile. |
|
CAPITOLUL IV
Surse de erori în procesul de masurare. Metode de corectie a erorilor
Prin utilizarea tehnicilor de scanare se pot obtine rezolutii de pâna la 1/10.000 din dimensiunea masurandului, în conditiile în care domeniul de masurare variaza între 10 si 500 mm.
Pentru asigurarea unei asemenea rezolutii, sursele de erori care intervin în procesul de masurare trebuie atent controlate si introduse corectiile necesare. Se practica, de asemenea, ca metoda de corectie a erorilor, medierea unui mare numar de scanari a unei aceleiasi dimensiuni a masurandului. Pentru practicarea acestei solutii, atât viteza unghiulara w de rotatie, cât si numarul n de fete ale oglinzii poligonale (cel mai uzitat tip de cap de scanare) trebuie sa fie mari, pentru realizarea unui timp de citire scurt, mai ales când se doreste practicarea controlului on-line al procesului de fabricatie pe care este introdus dispozitivul de scanare laser.
În continuare se vor prezenta, din literatura de specialitate, principalele tipuri de erori ce apar în procesul de scanare, precum si masurile specifice care se iau pentru corectia sau evitarea fiecareia.
4.1 Erori datorate sursei laser
Pentru aplicatiile industriale specifice scanarii se prefera în general laserele He-Ne, centrate pe lungimea de unda l = 633 nm, lasere care prezinta o serie de avantaje: durata de viata ridicata (zeci de mii de ore de functionare); preturi scazute; puteri relativ mari (pâna la 35 mW); grad de colimatie al fascicolului laser ridicat (divergenta fascicolului este de circa 1 mrad).
Un exemplu de sursa laser indicat în literatura ca rezultat al analizei performantelor caracteristice unui mare numar de surse este laserul He-Ne tip LGK 7672 produs de firma Siemens, alimentat la o tensiune de 10 13 V c.c., functionând la un curent cu intensitate mai mica de 1A. Dimensiunile de gabarit, de numai 25x50x80 mm îl fac adecvat includerii într-o constructie compacta.
Caracteristicile acestui laser sunt urmatoarele: lungime de unda l = 632,8 nm; putere emisa P = 2 mV, monomod, TEM c.c.; divergenta j = 1,2 mrad; diametrul fasciculului d = 0,75 mm; tensiune de tub: 1500 V 150 V; puterea de aprindere a tubului: 7 kW; intensitatea curentului prin tub: 5 mA; stabilitatea de putere 5%; masa 300 g; dimensiuni: F35x280 mm; temperatura de lucru (-20 C; timpul de viata peste 10.000 ore de functionare.
Repartitia de putere pe sectiunea fascicolului laser are alura unei distributii normale / gaussiene. În figura 2.14a este reprezentata dependenta intensitatii fascicolului în functie de raza curenta r (distanta de la axa fascicolului la punctul considerat).
Expresia algebrica a densitatii de putere a laserului în modul de baza este:
unde C0 = ct., iar dL este diametrul fascicolului laser.
Eroarea care apare în procesul de masurare datorita sursei laser are doua componente:
Eroarea de masurare datorita stabilitatii de putere (eip) - vezi figura 34b. Stabilitatea de putere este o caracteristica a fiecarui laser si este afectata de erori aleatoare. Pentru minimizarea acestei erori trebuie pur si simplu ales un laser cu stabilitatea cât mai buna.
|
|
Fig.34 Erori datorate sursei laser
Eroarea datorata dimensiunii fascicolului (eid) - vezi figura 34c. Dimensiunea fascicolului este de ordinul a 0,5 1 mm, iar eid poate atinge chiar 0,1 0,5 mm, ceea ce ar fi inacceptabil. În consecinta, pentru minimizarea lui eid se practica urmatoarele solutii:
expandarea razei laser initiale (Fig.35a) cu ajutorul unui sistem optic special (2), iar din fascicolul de diametru mare rezultat (3) selectarea, cu ajutorul unei diafragme (4), a unui fascicol îngust (5). Eroarea eid scade în acest fel sub 1 mm;
pozitionarea marginii masurandului în planul sau cel putin în vecinatatea planului focal imagine al sistemului optic, astfel încât dimensiunea fascicolului ce palpeaza masurandul sa fie minima în zona de masurare (Fig.35b).
pentru a elimina complet eroarea datorata dimensiunii fascicolului laser, se poate proceda la o divizare electronica a procesului de obturare, respectiv de aparitie a fascicolului de dupa piesa masurand. Se poate elimina eroarea datorata diametrului dL al fascicolului laser determinându-se practic "centrul fotometric" al fascicolului laser.
a) b)
Fig. 35 Expandarea razei
4.2 Erori datorate capului de scanare
Erorile datorate fluctuatiilor vitezei unghiulare w la capetele de scanare în miscare de rotatie (oglinzi plane sau poligonale rotitoare) pot fi înlaturate prin determinarea lui w în fiecare moment cu ajutorul unui disc codificator incremental sau cel putin prin contorizarea numarului de scanari cu o fotodioda de sfârsit de domeniu de scanare.
Erorile datorate aproximarii functiei
de scanare h(t) sau h(q wt)
cu o functie liniara, respectiv aproximarea vitezei de scanare ![]() cu o constanta. O
asemenea aproximare introduce în procesul de masurare o eroare
sistematica
care poate fi calculata cunoscându-se functia reala
de scanare h(t).
cu o constanta. O
asemenea aproximare introduce în procesul de masurare o eroare
sistematica
care poate fi calculata cunoscându-se functia reala
de scanare h(t).
4.3 Erori datorate masurandului
Eroarea datorata formei masurandului: Pentru piese cilindrice introduse în spatiul masurand, pot sa apara reflexii parazite (Fig.2.12) pe suprafata cilindrica, astfel încât fotodetectorul primeste semnale false. Proiectarea sistemului optic colector trebuie facuta în asa fel încât acest fenomen sa nu aiba loc.
Eroarea datorata starii suprafetei: Rugozitatea suprafetei masurandului si impuritatile depuse duc la o amplificare a fenomenului de difractie al fascicolului laser. În general defocusarea prin difractie a fascicolului se poate neglija, deoarece diametrul d mm] al discului de difractie al fascicolului pe muchia de difractie este foarte mic, de aproximativ 1,4x numarul de deschidere al sistemului optic:
unde s-au notat dL=diametrul fascicolului laser; f '= distanta focala a sistemului optic. De exemplu, pentru dL = 1 mm si f'=200 mm, rezulta d mm.
Intensitatea liniei de difractie este doar 1,6% din intensitatea initiala, deci fenomenul de difractie al fascicolului laser practic nici nu merita luat în considerare. Acesta este motivul pentru care sârme de diametru foarte mic pot fi masurate cu un fascicol laser puternic colimat.
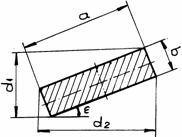
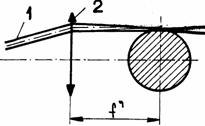
Fig. 36 Eroarea datorata impreciziei de pozitionare a masurandului
C3. Eroarea datorata impreciziei de pozitionare a masurandului: masurandul având de exemplu (Fig.36) forma sectiunii dreptunghiulara, eroarea care apare astfel are, pe fiecare din cele doua axe, respectiv expresiile:
|
Fig. 37. Erori datorate cinematicii masurandului |
Pentru o precizie suficient de buna de pozitionare, unghiul e se limiteaza uzual la 7
Eroarea datorata cinematicii masurandului: Miscarile masurandului (Fig.37) în directia x nu au nici o influenta asupra masuratorilor, iar cele în directia z pot induce o marire a erorii de masurare doar în cazul nerespectarii paralelismului riguros al fascicolului laser emergent din sistemul optic cu axa optica.
Deplasarile masurandului în directia y dau însa, prin efect Doppler, o eroare de masurare datorata celor doua viteze: de scanare (v), respectiv a masurandului (vy).
Daca fascicolul laser si obiectul se deplaseaza în aceeasi directie, valoarea obtinuta prin masurare este mai mare decât valoarea reala a masurandului; în caz contrar, pentru viteze de sens opus, dimensiunea masurandului apare mai mica decât cea reala. Fenomenul depinde de urmatorii factori: viteza de scanare, frecventa de scanare, marimea masurandului si numarul de masuratori mediate pentru a obtine o anumita dimensiune. De exemplu, pentru v = 125 m/s si o vibratie a masurandului cu frecventa de 30 Hz si amplitudinea de 3 mm, incertitudinea de masurare pentru o scanare individuala este de 0,5% din dimensiunea masurata.
TIPURI DE SCANARI
4.4.1 Scanarea bidimensionala (2D)
Baleierea planului xOy se asigura prin 2 scanere de tip oscilant, scanerul 1 (Sc.1) asigurând scanarea dupa axa Oy, verticala, iar scanerul 2 (Sc.2) dupa axa Ox, orizontala (Fig.38). S-a ales aceasta varianta de cap de scanare 2D în principal datorita simplitatii ei, în timp ce în Capitolul 1 au fost prezentate o serie de alte dispozitive de scanare 2D care pot fi utilizate.
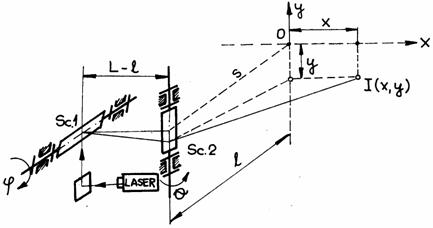
Fig. 38 Dispozitiv de scanare bidimensional (2D)
Functie de unghiurile de rotatie j si respectiv q ale scanerelor, se pot scrie asadar expresiile functiilor de scanare, care dau pozitia punctului I de incidenta cu planul scanat:
Observatie: Pentru usurinta scrierii relatiilor s-a considerat (vezi figura 39) pozitia j=0 corespunzând pozitiei oglinzii înclinate cu p/4 fata de orizontala, când raza este reflectata dupa directia orizontala si se parcurge (prin rotatia oglinzii Sc.2), axa Ox. Cu aceste considerente, urmarind constructia din figura 39, rezulta imediat
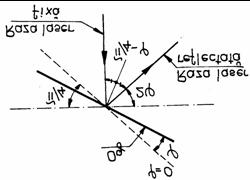
Fig.39. Considerarea unghiurilor oglinzii la scanarea 2D
O discutie perfect analoaga se poate realiza pentru Sc.2. Rezulta imediat relatia (5.1)1 si de asemenea faptul ca, prin constructie (Fig. 38) punctul:
![]()
Amplitudinile unghiulare qa si ja sunt alese astfel încât sa se scaneze suprafata dorita, de exemplu un dreptunghi (sau o suprafata înscrisa într-un dreptunghi) cu laturile:
acestea fiind dimensiunile domeniului de scanare.
Observatie: Tot pentru usurinta scrierii s-a ales distanta dintre axa de rotatie a oglinzii Sc.1 si planul xOy, L, evident masurata prin rabaterea cu p/2 a directiei razei orizontale (de q = 0 si j = 0) în punctul în care acesta atinge oglinda Sc.2. A rezultat astfel (vezi figura 38), distanta dintre axele de rotatie ale celor doua scanere egala cu L-l.
4.4.2 Scanarea tridimensionala (3D)
Se pune problema dezvoltarii unei solutii cât mai elegante pentru determinarea coordonatei z. În acest sens se vor lua în considerare, evident, solutiile cu cost minim, varianta utilizarii unui interferometru laser de exemplu, care ofera precizia maxima, fiind de dorit doar în aplicatiile care ar justifica o asemenea investitie.
Solutia 1 o constituie utilizarea a înca unui echipament identic cu cel prezentat în paragraful anterior, dar pozitionat rectangular fata de primul (de exemplu, cu un Sc.1' la distanta (0,Sc.1') = x fata de planul yOz). Aceasta varianta comporta însa o serie de dezavantaje: echipament dublat, asadar eforturi si costuri duble; redundanta în determinarea unei coordonate (în exemplul considerat, y), care va fi determinata independent de catre ambele sisteme de scanare.
Se poate face însa si observatia ca cel de-al doilea aspect ar putea constitui, este adevarat, si un avantaj: obtinerea unei aceleiasi dimensiuni pe doua cai ofera posibilitatea verificarii permanente a acuratetii procesului de scanare în cazul de asteptat al sincronizarii (prin comanda în paralel) functionarii celor doua sisteme.
Solutia 2: Având în vedere dezavantajul major al solutiei 1 (echipament si cost), se propune în cele ce urmeaza dezvoltarea unor variante mult mai simple, cu caracter original, optime pe categorii de aplicatii, deci specializate. Pentru aceste variante ideea este ca echipamentul suplimentar necesar sa fie redus la minim, utilizându-se în determinarea celei de-a treia coordonate, "profunzimea" z, tot sistemul de scanare cu care se determina x si y.
Principiul de functionare
Raza produsa de laserul (1), reflectata pe oglinzile sistemului de scanare (2), ajunge pe suprafata S de tip oglinda a probei si este reflectata pe un sistem optic (S.O.) de tip obiectiv, care o focalizeaza pe un sir de fotodiode FD.
Ordonata y' a punctului de incidenta I constituie o masura a deplasarii z a planului S.
CAPITOLUL V
Dispozitive de scanare cu elemente în miscare de rotatie
Principiul de functionare al dispozitivelor de scanare cu elemente în miscare de rotatie adaptate pentru masuratori dimensionale a fost deja prezentat în paragraful. În acest capitol se vor considera pe rând principalele variante constructive posibile, procedându-se la analiza lor functionala din punct de vedere opto-mecanic si stabilindu-se elementele si etapele necesare ale calculului de proiectare, cu indicarea principalelor avantaje si dezavantaje specifice fiecarei solutii. Fata de aspectele existente în literatura de specialitate, calculul analitic se va aborda fara ipotezele simplificatoare uzuale , atât partea de analiza dezvoltata, cât si cea de sinteza / proiectare a capului de scanare constituind astfel un pas înainte fata de cele deja cunoscute.
5.1 Capul de scanare cu oglinda plana rotitoare (monogon)
Schema opto-mecanica a dispozitivului, adaptat pentru masuratori dimensionale, este prezentata în figura 41. Oglinda plana care joaca în acest caz rolul capului de scanare poate avea una sau ambele fete active (reflectante). Varianta cu ambele fete reflectante are avantajul unei mai bune utilizari a timpului disponibil pentru procesul de scanare. Dezavantajul este ca, datorita grosimii finite a oglinzii, punctul obiect pentru sistemul optic S.O.1. ar "migra" de-a lungul axei optice A.O., ceea ce ar duce la aparitia unor erori fata de conditia mentinerii unui paralelism strict si permanent al razei emergente din S.O.1. cu axa optica.
De aceea în continuare se va prefera varianta în care oglinda rotitoare are o singura fata activa (reflectanta) a carei plan contine axa de rotatie a oglinzii, astfel încât punctul obiect pentru S.O.1. ramâne în permanenta în punctul A (Fig. 41). Evident, în acest caz, sistemul S.O.1. va trebui foarte bine corectat de aberatia de sfericitate longitudinala.
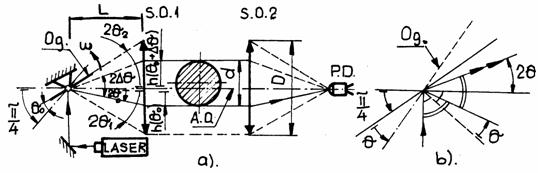
5.2 Capul de scanare cu oglinda poligonala rotitoare
Schema de principiu a dispozitivului este prezentata în figura 42, indicându-se principalii parametrii geometrici ai ansamblului:
R = raza cercului înscris în poligonul regulat cu "n" laturi (apotema).
2a = unghiul la centru care subîntinde o latura a poligonului;
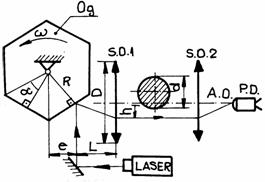
Fig .42. Sistem de scanare cu oglinda poligonala rotitoare
e = "excentricitatea" razei laser fixe fata de axa de rotatie a oglinzii (identica cu axa de simetrie a oglinzii poligonale);
L = distanta de la raza laser fixa la planul principal obiect H1 al sistemului optic S.O.1;
D = dimensiunea maxima de scanare = diametrul pupilei de intrare a S.O.1 în plan meridian.
Principiul de functionare este identic cu cel de la oglinda plana rotitoare, la fel, notatiile realizate în cazul respectiv se pastreaza.
Pentru determinarea functiei de scanare h(q), în figura 43 s-a reprezentat o fateta a poligonului în trei pozitii caracteristice, pentru q q p q , unde q sunt unghiurile pentru care începe, respectiv se finalizeaza scanarea spatiului masurand, unghiuri masurate fata de pozitia q = 0 a apotemei poligonului fata de verticala.
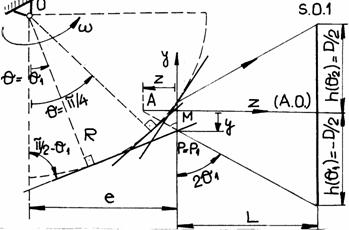
Se observa, ca un fenomen caracteristic acestui tip de cap de scanare, "migrarea" punctului obiect A al sistemului optic S.O.1 de-a lungul axei optice, punctul A fiind definit de intersectia dintre raza reflectata si A.O. (este ca si cum raza incidenta pe S.O.1 ar porni efectiv din A).
Ipoteze de lucru
Se pune problema dezvoltarii unei solutii de cap de scanare rotitor care sa elimine toate dezavantajele solutiilor anterioare (cu oglinda plana, respectiv cu oglinda poligonala rotitoare), asadar un cap de scanare care sa îndeplineasca urmatoarele deziderate esentiale:
1. compensarea totala si reciproca a erorii date de aberatia de sfericitate longitudinala a sistemului optic S.O.1 prin eroarea data de "deplasarea" punctului obiect axial A al sistemului S.O.1.
2. obtinerea unei viteze constante de scanare a spatiului masurand: v = ct.;
3. obtinerea unui grad de acoperire h cât mai aproape de 1.
Capul de scanare rotitor va rezulta în acest caz ca o cama optica profilata ca un poligon regulat, cu "n" laturi identice suprafete riglate (cilindrice), având ca si generatoare o curba a carui profil trebuie determinat.
5.3 Justificarea alegerii solutiei capului de scanare oscilant
În capitolul precedent s-a discutat pe larg realizarea dispozitivului de scanare laser având capul de scanare un element în miscare de rotatie: oglinda plana sau poligonala, cu fete drepte sau curbe. S-au putut observa din discutie atât avantajele, cât si dezavantajele fiecarei solutii. Exista astfel mai multe probleme a caror analiza conduce la dezvoltarea unor alte solutii de cap de scanare, preferabile din anumite puncte de vedere. Se pot aminti astfel urmatoarele aspecte:
Capul de scanare cu oglinda plana rotitoare corespunde din punct de vedere al simplitatii constructive si a respectarii conditiei de paralelism a razei ce scaneaza spatiul masurand cu axa optica (A.O.), aceasta din urma însa numai utilizând sisteme optice S.O.1 relativ complicate, foarte bine corectate de aberatia de sfericitate. Deja este o problema constructiva si economica careia i se adauga faptul absolut necorespunzator al unui grad de acoperire h extrem de redus, ceea ce face solutia în general neconvenabila;
Capul de scanare cu oglinda poligonala cu fete drepte are, spre deosebire de situatia anterioara, un h bun, chiar cvasiunitar, în conditiile unui fascicul laser puternic colimat. În plus, respectând rigorile mersului de proiectare (traiect totusi destul de complicat), se poate ajunge la compensarea reciproca, cel putin partiala, a celor doua surse principale de erori, sa le spunem de tip constructiv. Solutia poate asadar corespunde cerintelor unor teme de proiectare pretentioase (parametrii de rezolutie si precizie ridicati), având ca aspect de dificultate viteza de rotatie w ridicata ceruta (chiar la utilizarea unor oglinzi cu un numar "n" de laturi ridicat) pentru a se realiza vitezele de scanare(v) foarte mari impuse de anumite aplicatii (vezi cazul clasic al imprimantei laser);
Capul de scanare cu oglinda poligonala cu fete curbe, "cama optica", prezinta toate aspectele, atât cele pozitive cât si cele negative prezentate anterior, cu deosebirea ca este posibila acum compensarea totala a aberatiei de sfericitate a S.O.1 si utilizarea unui sistem optic extrem de simplu, ieftin în conditiile în care marirea pretului dispozitivului datorita realizarii suprafetelor riglate ale camei este mai redusa decât pentru realizarea unui sistem optic refractant deosebit de complex (în general cuprinzând si o suprafata asferica), asadar scump si, în plus, posibil de utilizat doar pentru o anumita aplicatie, pentru care a fost proiectat.
Având în vedere toate aceste considerente, dispozitivul de scanare cu element în miscare de oscilatie apare ca o solutie viabila din urmatoarele considerente:
a) utilizarea oglinzilor plane ca elemente reflectante (simplitate constructiva) dar în miscare de oscilatie, rezultând h cvasiunitar, eliminându-se astfel dezavantajul solutiei de la punctul 1. Este adevarat, nu se atinge nici aspectul deosebit care apartine numai punctului 3, cu S.O.1 foarte simplu si compensare totala a aberatiei sale de sfericitate. În cazul oglinzii plane oscilante, S.O.1 va trebui proiectat puternic corectat de aberatia de sfericitate (dar aceasta numai pe cursa unghiulara, specifica, a oglinzii).
b) utilizarea unor solutii de antrenare a oglinzii care au urmatoarele avantaje:
gabarit redus, compabilitate mare a solutiei constructive;
realizarea unor frecvente, asadar viteze mari de oscilatie, în conditiile unor solutii constructive simple si ieftine (montaj galvanometric sau bucla de oscilograf, de exemplu);
posibilitatea obtinerii unor legi de miscare impuse pentru echipajul mobil (cu oglinda oscilanta), deci pentru fasciculul de scanare, prin intermediul unor functii de comanda usor de realizat electronic.
CAPITOLUL VI
Capul de scanare cu oglinda plana rotitoare (monogon)
6.1 Functia de scanare
Schema opto-mecanica a dispozitivului, adaptat pentru masuratori dimensionale, este prezentata în figura 44. Oglinda plana care joaca în acest caz rolul capului de scanare poate avea una sau ambele fete active (reflectante). Varianta cu ambele fete reflectante are avantajul unei mai bune utilizari a timpului disponibil pentru procesul de scanare. Dezavantajul este ca, datorita grosimii finite a oglinzii, punctul obiect pentru sistemul optic S.O.1. ar "migra" de-a lungul axei optice A.O., ceea ce ar duce la aparitia unor erori fata de conditia mentinerii unui paralelism strict si permanent al razei emergente din S.O.1. cu axa optica.
De aceea în continuare se va prefera varianta în care oglinda rotitoare are o singura fata activa (reflectanta) a carei plan contine axa de rotatie a oglinzii, astfel încât punctul obiect pentru S.O.1. ramâne în permanenta în punctul A (Fig. 41). Evident, în acest caz, sistemul S.O.1. va trebui foarte bine corectat de aberatia de sfericitate longitudinala.
Functia de scanare unghiulara este, mentinând viteza unghiulara a oglinzii w=ct.:
q w t
unde s-a ales la originea timpului (t=0), unghiul q = 0 pentru pozitia Og înclinata cu p/4 fata de A.O., pozitie pentru care raza laser reflectata are chiar directia axei.
Functia de scanare liniara este data de pozitia razei care parcurge / scaneaza spatiul masurand fata de A.O. Se observa din figura 44 ca:
h(q) = L tg 2 q
unde L, distanta de la raza laser fixa la S.O.1, trebuie sa fie egala cu distanta focala obiect a acestuia, adica:
![]()
Domeniul de scanare este definit de unghiurile q pentru care raza laser începe, respectiv termina scanarea spatiului masurand (caracterizat de dimensiunea D utila a S.O.1,2 - deschiderea pupilei de intrare în plan meridian). Se poate scrie asadar conditia:
![]()
Fig.45. Functia de scanare
Caracteristica de functionare
Din relatii se obtine:
h (t) = L tg 2 wt
asadar caracteristica de functionare a aparatului, data de dimensiunea "d" a masurandului, se va scrie ca o functie de doua variabile:
t0 = momentul de timp (fata de q=0 la t=0) când raza laser atinge marginea inferioara a masurandului, moment în care fotodioda FD înceteaza sa mai primeasca semnal optic), figura 3.1a;
Dt = intervalul de timp în care raza laser "parcurge" masurandul. La sfârsitul lui Dt, raza "rasare" pe dupa marginea masurandului si FD începe sa primeasca din nou semnal optic.
Dimensiunea "d" a masurandului dupa directia de scanare rezulta:
d = h(t0 + Dt) - h(t0)
Efectuând calculele, cu relatiile (3.2) si (3.7)' rezulta astfel :
![]()
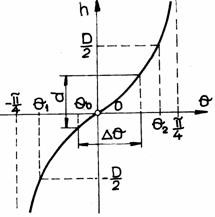
Din graficul functiei de scanare h(q) (Fig.45) se observa cum, datorita neliniaritatii lui h, "d" depinde de ambii parametrii, (q Dq), adica este functie si de asezarea masurandului în spatiul scanat, nu doar de dimensiunea acestuia în directia de scanare.
Acest aspect constituie un dezavantaj si trebuie luat în considerare în procesul de masurare printr-un software corespunzator de prelucrare a semnalului de iesire.
6.2 Cazuri particulare
1. Caracteristica de functionare de o singura variabila se obtine în cazul masurandului centrat pe axa optica. Respectarea conditiei de centrare (avantajoasa dar dificil de realizat practic) a axei masurandului pe A.O. duce la simplificarea caracteristicii. Din figura 44, conditia se scrie:
q Dq/2 => 2q Dq (3.10)
si înlocuind (3.10) în (3.9), rezulta functia dorita:
![]() (3.11)
(3.11)
2. Caracteristica de functionare liniarizata:
Liniarizarea caracteristicii de functionare se face prin liniarizarea functiei de scanare h.
Se poate scrie functia de scanare liniarizata aplicând aproximatia lui Gauss:
![]()
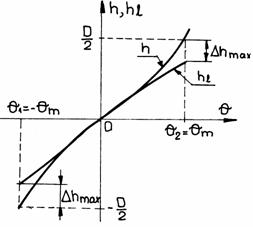
Fig 46. Functia de scanare reala h si liniarizata hl
Abaterea de la functia reala este tinand seama de dezvoltarea în serie Taylor a functiei tangenta:
![]()
rezulta: ![]()
abaterea maxima de la functia reala este (Fig. 46):
![]()
Eroarea de liniaritate: ![]()
va avea în consecinta valoarea
maxima: 
Problema care se pune este asigurarea conditiei de liniarizare.
Aceasta se realizeaza prin minimizarea lui qm
astfel încât: ![]() . Rezulta:
. Rezulta:
![]() =5,71
=5,71
Solutia 1: Minimizarea diametrului D a lui S.O.1 în plan meridian se realizeaza utilizând solutii de dispunere a masurandului de tipul celor prezentate în tabelul 2.3, asadar fixând largimi cât mai mici ale domeniului de interpolare (realizându-se masuratori comparative). Evident, aceasta posibilitate este limitata de tema de proiectare, adica de valoarea necesara a lui D.
Solutia 2: Marirea lui L: Se urmareste marirea parcursului razei reflectate în conditiile realizarii unei constructii cât mai compacte cu un gabarit cât mai redus.
S-au dezvoltat urmatoarele variante:
A Dispozitiv cu oglinzi plane suplimentare (Fig.47): Se dispun, într-o. constructie uzitata, trei oglinzi suplimentare - fata de varianta initiala: Og.1,2,3
Se observa ca L creste de mai mult de trei ori: parcursul razei reflectate este cel de la Og.1 la S.O.1, asadar Dhmax scade conform discutiei anterioare de mai mult de 9 ori. Teoretic s-ar putea folosi un sistem cu si mai multe oglinzi suplimentare, dar ansamblul s-ar complica nepermis de mult, rezultând dificultati constructive si de montare, marirea gabaritului, a masei si a costului de realizare.
B Dispozitiv cu oglinda-unghi:
Pentru simplitate constructiva si utilizarea unui numar minim de oglinzi - doua, s-a dezvoltat solutia ansamblului cu oglinzi unghi.(vezi figura).
Pozitionarea imaginilor multiple Sj pe C(0,d) este data de unghiul:
![]()
![]()
Relatia (3.24)
este valabila,
se observa
imediat, si pentru cazul în care ![]() , adica pentru situatiile în
care se face constructia imaginii în prelungirea oglinzii
corespunzatoare.
, adica pentru situatiile în
care se face constructia imaginii în prelungirea oglinzii
corespunzatoare.
Numarul N total de imagini multiple care se formeaza se obtine observând faptul ca ultima imagine posibila, SN, "cade" în interiorul prelungirii laturilor unghiului diedru, iar cea precedenta, SN-1, era înca în exteriorul prelungirilor laturilor, adica:
 =>
=> 
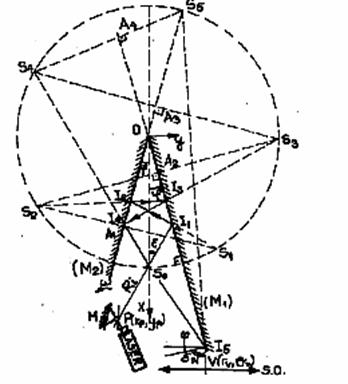
Fig.48 dispozitiv cu doua oglinzi
Numarul N
reprezinta, se observa din constructia din figura 48, si
numarul
total de reflexii posibile pe laturile unghiului diedru pentru o raza
incidenta
în sistem prin S0 sub un unghi e,
cu ![]() , domeniul unghiular pentru care discutia are sens.
Pentru diferitele pozitii ale oglinzii Og1, d si
e se modifica, dar N, numarul
de imagini formate, ramâne constant, el depinzând numai de j.
Constructia se face simplu, tinând seama de faptul ca raza R(j),
obtinuta dupa reflexia "j", este ca si cum ar
porni din "sursa" Sj, conform constructiei imaginilor
în oglinzi plane.
, domeniul unghiular pentru care discutia are sens.
Pentru diferitele pozitii ale oglinzii Og1, d si
e se modifica, dar N, numarul
de imagini formate, ramâne constant, el depinzând numai de j.
Constructia se face simplu, tinând seama de faptul ca raza R(j),
obtinuta dupa reflexia "j", este ca si cum ar
porni din "sursa" Sj, conform constructiei imaginilor
în oglinzi plane.
Marirea distantei L, ceea ce constituie scopul discutiei, se face optimizând functia L(j e), în sensul obtinerii unui maxim al acesteia; se observa ca:
unde I = punctul de incidenta al razei Re pe S.O.1. Din considerentele geometrice discutate, efectuând calculele, în final rezulta:

Gradul de acoperire
O problema majora a dispozitivului de scanare cu oglinda plana rotitoare este proportia mica din timpul total disponibil care poate fi utilizata efectiv în procesul de scanare. Acest aspect constituie din start un dezavantaj si pentru aprecierea lui se introduce parametrul numit grad de acoperire (prin analogie cu teoria mecanismelor), definit ca raportul dintre intervalul de timp utilizat pentru scanarea spatiului masurand si intervalul total de timp disponibil. În literatura de specialitate, acest parametru se regaseste sub denumirea de "duty cycle" (h
Considerând cazul unei singure rotatii, se poate scrie:
h = (t2 - t1)/T
unde: T = timpul total disponibil (perioada de rotatie a oglinzii); t1,2 = momentul în care începe, respectiv se termina scanarea spatiului masurand (pentru care respectiv q q q
Deoarece în cazul considerat w = ct., relatia devine:
h q q p
si
tinând seama de relatia precedenta , rezulta: 
6.3 Concluzie privind dispozitivele de scanare cu oglinda plana rotitoare
Pentru determinarea functiei de scanare pe cale experimentala s-au realizat masuratorile fata de pozitia de h=0 a oglinzii (înclinata cu unghiul p/4 fata de directia razei laser).
S-au efectuat masuratorile pentru diferite valori distincte ale parametrului L = distanta de la axa de rotatie a oglinzii (continuta în planul suprafetei reflectante).
Din diagramele rezultate (de tipul curbelor din figura 49)
se observa curbarea progresiva a curbei functiei de scanare cu
micsorarea lui L si invers, marirea gradului de liniaritate a
lui h(θ) cu marirea lui L.
Fig. 49 Functia de scanare hexp pentru doua valori ale lui L (DS cu Og. plana rotitoare)
Concluzie
Aplicatiile de proximitate necesita sistem optic refractant (inclusiv pentru liniarizarea caracteristicii), pe când în aplicatiile de scanare la distanta, aceasta liniarizare este realizata prin marirea lui L
|